New Husarion UGV ROS 2 driver release!
· 7 min read

We're thrilled to announce the release of the latest Husarion UGV ROS 2 driver – Jazzy 2.3.2 – our biggest update in a while, with plenty of new features to share. This update brings a host of new features, improvements, and bug fixes that enhance the performance and capabilities of our Unmanned Ground Vehicles (UGVs). Whether you're using the Panther or Lynx platform, this new driver version is designed to provide a more seamless and efficient experience for all users.
Continue reading to explore the key features of the Husarion UGV ROS 2 driver, including:
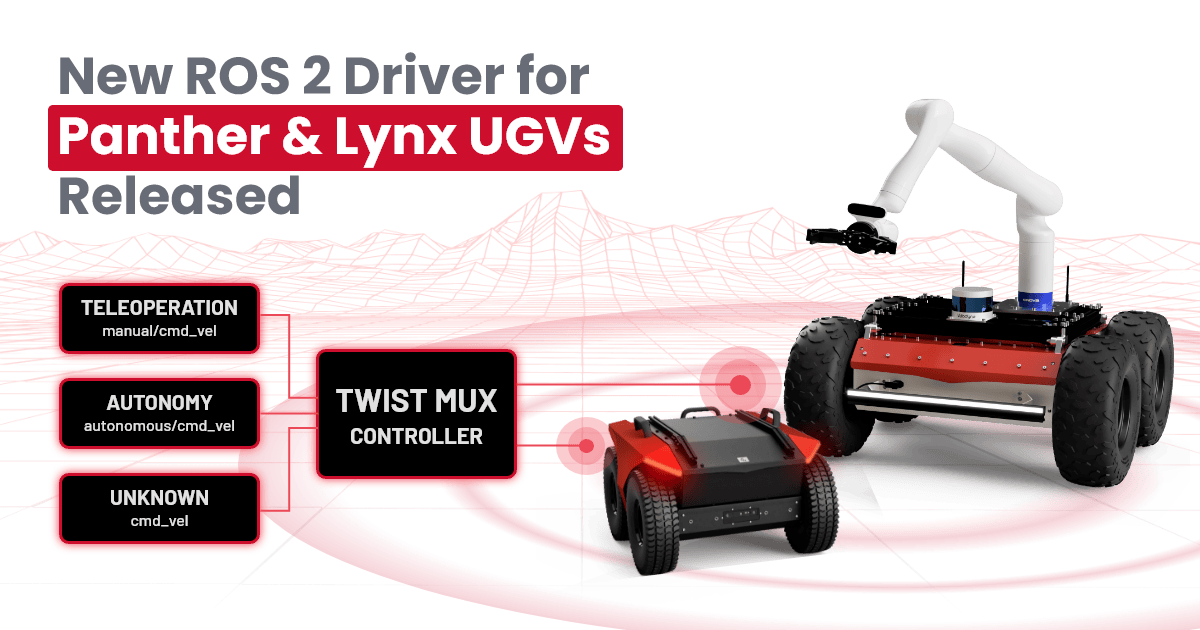
- The Twist Mux Controller: A custom, chainable
ros2_controlcontroller built for deterministic, low-latency command velocity handling. - Simulation Improvements: Plug-and-play gamepad support and high-precision ground truth tracking in Gazebo.
- New LED Animations: Introducing GOAL_FAILED and FLOOD_LIGHT animations for enhanced diagnostics and visibility.
- Updated URDF Components: New and improved components in the
husarion_components_rospackage, including a new rack component, custom component support, and enhanced visual representations of existing components.