






Enhancing AMR
development
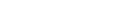
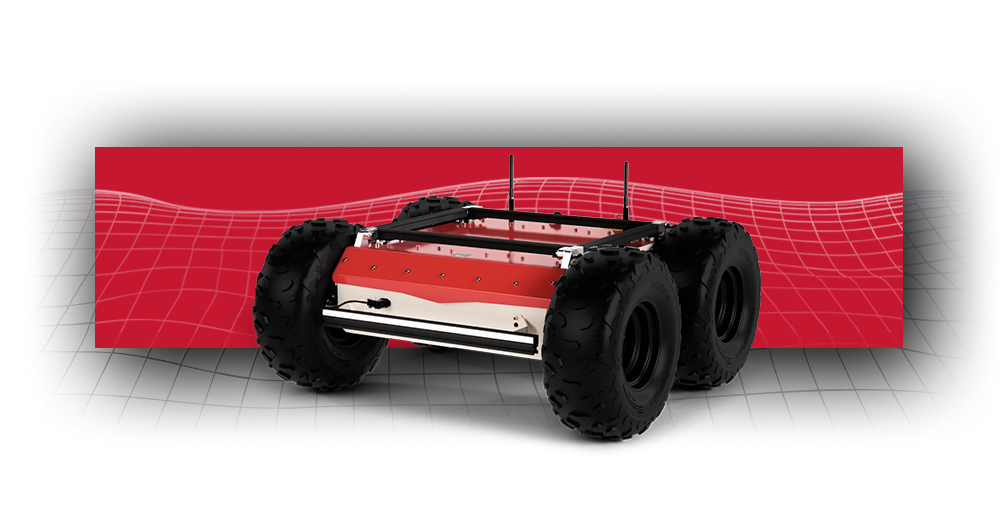
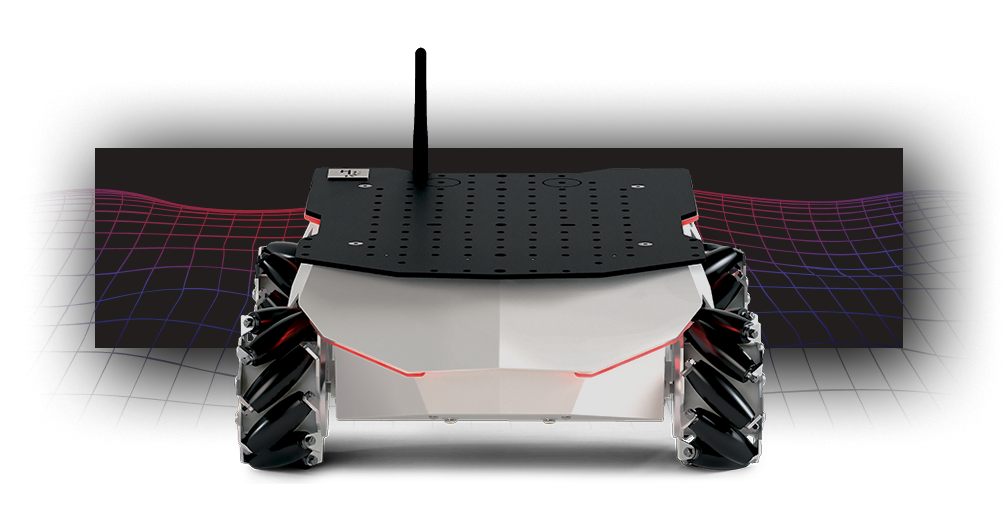
Our robust, autonomous, mobile robots can be used as a base platform for a variety of AMR (Autonomous Mobile Robots) applications. Building and scaling your project to create real-world solutions is made easy through the use of simulation models, along with an extensive array of tutorials and manuals.
Custom
robot
design
We have vast experience in designing and building autonomous mobile robots (AMR) dedicated for agriculture, construction, logistics and others.
Contact Sales Team
- HARDWARE
- electronics design
embedded software design
mechanical design
certification consulting
- SOFTWARE
- ROS software design
simulation model design
robot connectivity
fleet management systems
What do our clients say?


“The main points for choosing Panther as a base for our last mile delivery robot were its durable built quality which is suited for sustained outdoor use, the transparent open source software with its ROS interface and the high payload capacity - all at a very competitive price point. Especially the fact that the software on Panther is open source helped us during development since we were able to quickly reason about or fix small issues on our own.”
Thomas Staufenbiel, CEO at Gestalt Robotics










Address
Husarion sp. z o.o.
ul. Golikówka 45
30-723 Kraków
Poland
See in Google Maps 
Contact
contact@husarion.comsupport@husarion.com
