Manuals
Welcome to the technical documentation for Husarion's autonomous mobile robots.
Panther
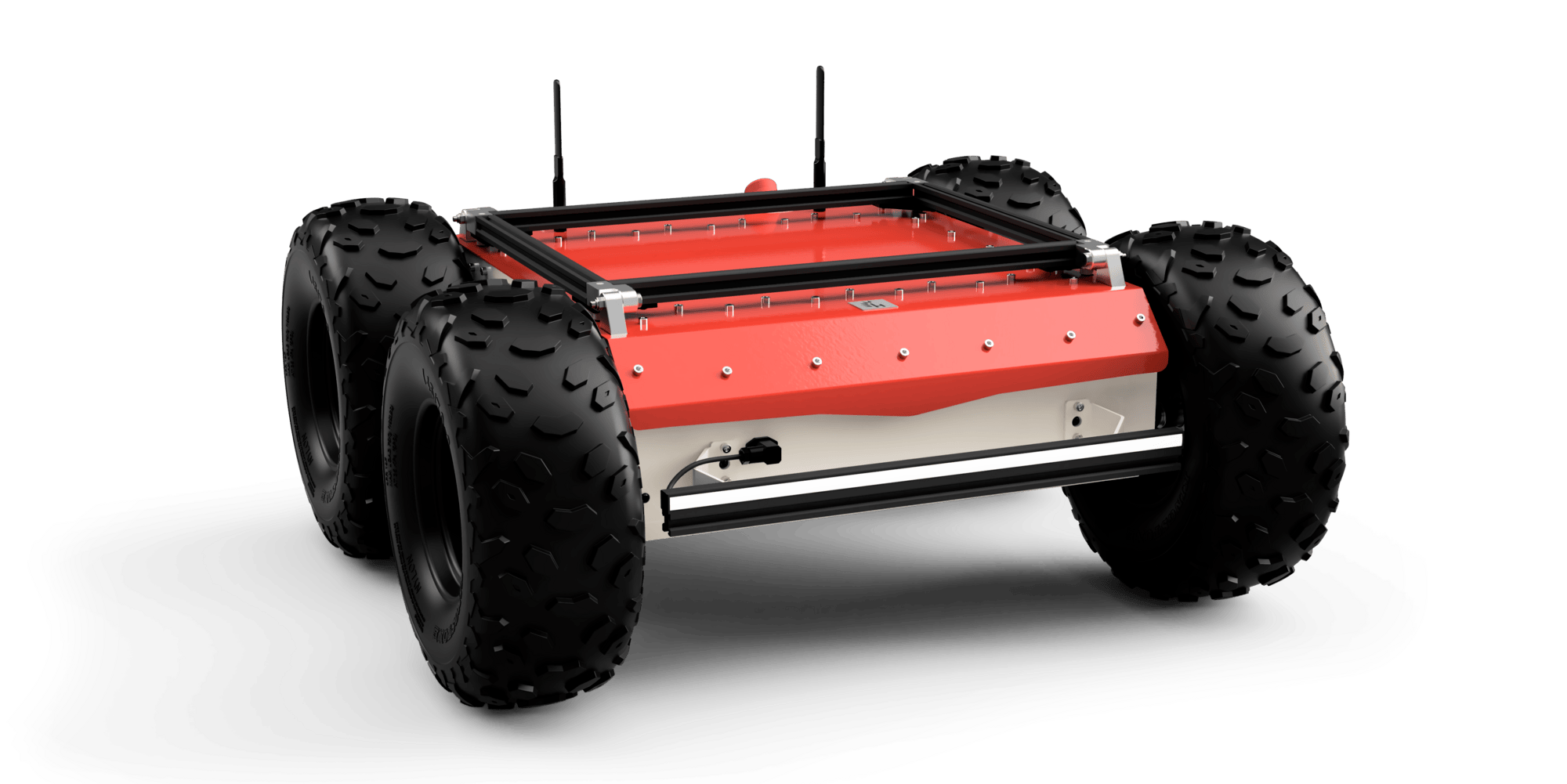
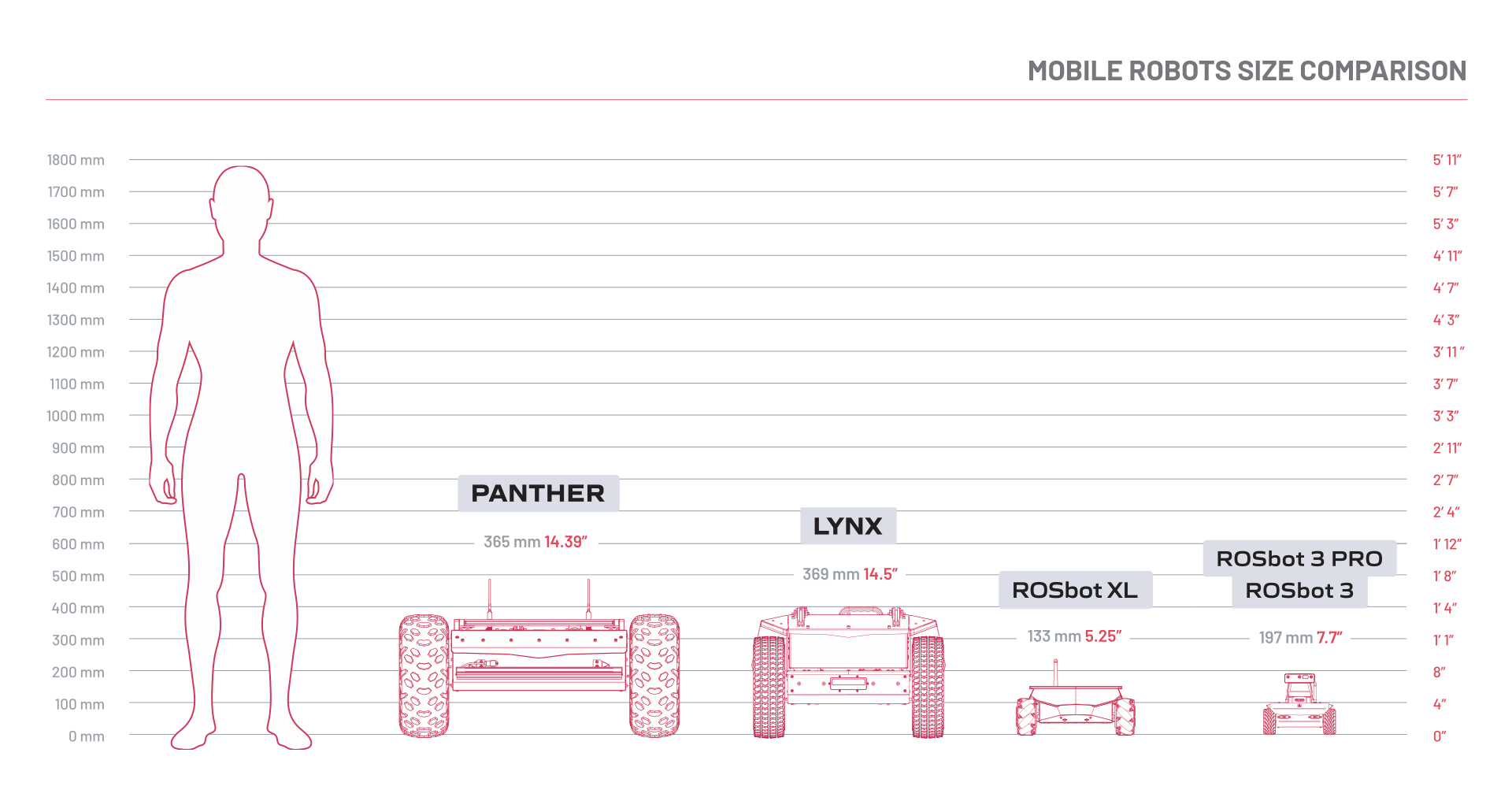
Panther is a rugged Unmanned Ground Vehicle (UGV) platform, engineered for demanding outdoor environments. Equipped with high-profile wheels and four powerful BLDC motors, plus an IP54/66-rated chassis, it’s designed to tackle the toughest challenges. Panther’s versatility enables seamless integration of LIDARs, 3D cameras, manipulators, and other components through its V-slot mounting rail, available power ports, and extensive communication interfaces. With open-source ROS and ROS 2 drivers, along with a robust suite of software examples, Panther makes developing your product or research project both simple and intuitive.
Lynx

Lynx is a compact and robust Unmanned Ground Vehicle (UGV) platform designed for seamless operation in both indoor and outdoor environments. Featuring an IP54/66-rated, rugged alloy chassis, Lynx withstands harsh conditions while measuring just 54 cm in width—allowing it to navigate tight spaces and standard doorways effortlessly. Its modular design includes a hot-swappable battery system and a customizable user compartment, allowing users to tailor the robot to their specific needs without overcomplicating the setup. Lynx facilitates the integration of LIDARs, 3D cameras, manipulators, and other components through its T-slot mounting rail, accessible power ports, and extensive communication interfaces. Supported by open-source ROS 2 driver and a comprehensive suite of software examples, Lynx simplifies the development process for your product or research project.
ROSbot XL

ROSbot XL is a versatile indoor mobile robot platform, purpose-built for research, education, and application development. With increased payload capacity, higher max speed, and enhanced carrying ability compared to ROSbot 3, ROSbot XL can be a good base for your custom application. With the flexibility to integrate different sensors and other equipment, ROSbot XL allows users to tailor the platform to their specific project requirements. Alternatively, you can choose from a range of pre-configured packages tailored to specific applications, such as indoor navigation and mobile manipulation. The robot supports various computing platforms, including Raspberry Pi, Intel NUC, and NVIDIA Jetson Orin Nano, with Ethernet-based communication to its built-in microcontroller running micro-ROS. Open-source ROS 2 drivers and a user-friendly interface make it easy to operate the robot right out of the box, whether through a web-based interface or gamepad control, providing an intuitive experience for both beginners and experts.
ROSbot 3 / ROSbot 3 PRO

ROSbot 3 / ROSbot 3 PRO is an indoor mobile robot platform, purpose-built for research and education. Powered by a Raspberry Pi 5 and constructed with a durable 1.5mm alloy chassis, it offers robust performance and reliability. The ROSbot 3 features a SLAMTEC C1 LIDAR and Luxonis OAK-D Lite camera, while the ROSbot 3 PRO is equipped with an enhanced SLAMTEC S2 LIDAR and OAK-D Pro camera for superior perception and SLAM capabilities.
The open-source ROS 2 drivers are pre-installed and configured, enabling out-of-the-box operation without additional setup. Users can start interacting with the ROSbot through a web-based interface or a gamepad—no coding required—making it an ideal platform for beginners and experts alike. With four DC motors, each equipped with independent quadrature encoders, ROSbot 3 provides precise motion control for navigating complex indoor environments, accelerating your research and development in robotics.