Heat Follower Robot

Description
Heat Follower is a project based on the ROSbot Pro platform, that follows heat by using a 360 degree thermal camera. It utilizes a MLX90641 sensor which is a 16x12 pixels IR sensor array. With some custom hardware it is possible to rotate this sensor and get a surround infrared image.
Hardware
Hardware used in this project:
- ROSbot PRO
- IR Thermal Sensor Array
- Slip Ring
- Custom PCB designed in Eagle
- Custom enclosure designed in Fusion 360
Software
Thermal Camera
Software for Thermal Camera is written in PlatformIO IDE to ensure compatibility with multiple platforms. MLX90641 API is used to ensure proper communication with the IR Sensor. It is slightly modified to support STM32's hardware. Micro-ROS libraries are mandatory to communicate with ROSbot.
ROS2 Python Node
A simple Python node was written to process the input thermal image with OpenCV and steer the robot.
When a heat source is detected, this node sends rotational and linear velocities via /cmd_vel topic.
ROS Description
| Topic | Node Name | Description |
|---|---|---|
/thermal_image | /thermal_camera | Raw thermal image represented with grayscale image (temperature = pixel intensity/100). |
/tc_image_devel | /thermal_subscriber | Normalized image with target object contours. |
/tc_goal_angle | /thermal_subscriber | Arrow marker pointing at the target angle relative to the robot. |
Additionally there are 3 parameters
| Parameter | Node Name | Type | Description |
|---|---|---|---|
target_min_temp | /thermal_subscriber | int | Minimum temperature of object |
target_max_temp | /thermal_subscriber | int | Maximum temperature of object |
go_to_hottest_piont | /thermal_subscriber | bool | If true, robot follows the hottest object. If false, robot follows object which temperature is within target_min_temp and target_max_temp. |
System schematic diagram:
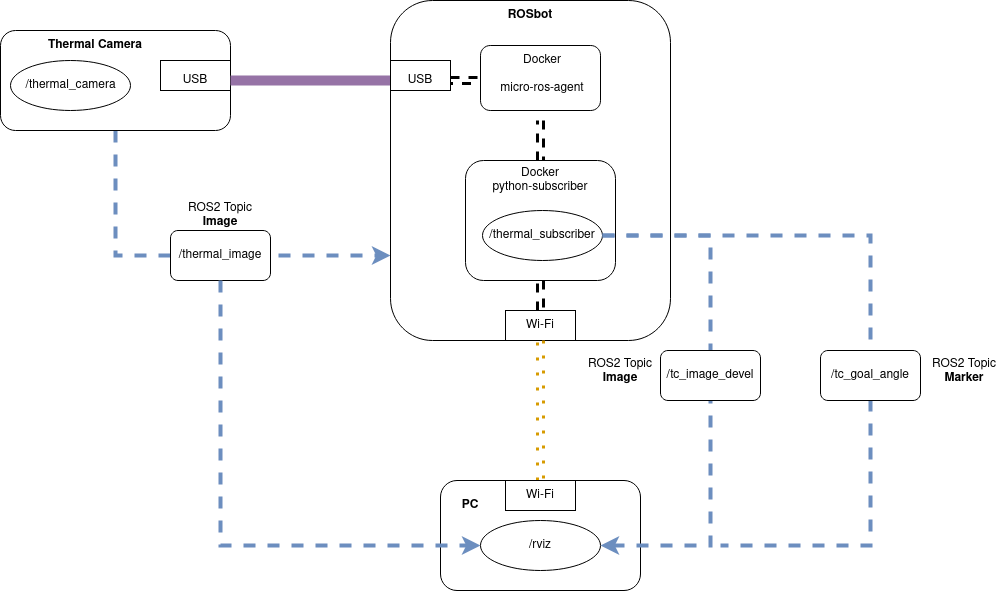
The camera sends the main topic /thermal_image - a raw unprocessed image which is then transformed by /thermal_subscriber node. The transformed image published on /tc_image_devel contains a normalized image with a contour of an object selected by the algorithm. The angle of a selected object can also be visualized with /tc_goal_angle marker that publishes an arrow pointing from base_link to the direction of the object.
Building the project
Flashing MCU
Open the project with Visual Studio Code with PlatformIO plugin.
This project is optimized for STM32F4 MCU's - keep that in mind when flashing on your hardware!
After installing the PlatformIO extension to your VSCode, click its icon on the Activity Bar then from Project Tasks select General and Upload.
Running on ROSbot
Clone robot folder to your ROSbot, connect the Thermal Camera via USB and run
cd robot/
docker-compose -f docker-compose.yaml up
After downloading all the necessary docker images ROSbot should follow warm objects nearby.
Due to issues connected with micro-ros agent, user must unplug and plug the Thermal Camera to reset the connection before running the docker compose.
Running Rviz on PC
Clone pc folder to your PC and run:
cd pc/
xhost local:root
docker-compose -f compose.pc.yaml up
Rviz should now pop up showing ROSbots surroundings in deep infrared.
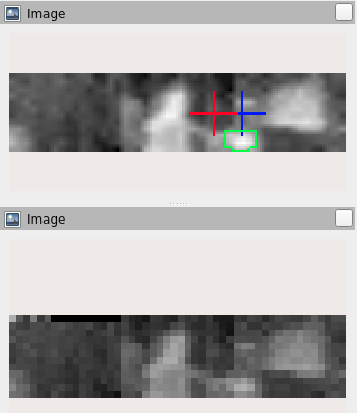
If images are not visible click Add -> By topic -> /thermal_image
Here's ROSbot facing a kettle:

