Luxonis - OAK Series
The OAK cameras by Luxonis are small cameras for robotic vision with an on-device Neural Network inferencing and Computer Vision capabilities. Luxonis is a spatial AI and CV platform that focuses on embedded machine learning and computer vision technology.
- OAK-1: a compact camera module designed for versatile use in various AI projects. Thanks to the processor, it allows you to detect objects in real time.
- OAK-D Lite is a more advanced version of OAK-1. It comes with additional features such as an RGB-D depth sensor and stereo cameras.
The advantages of both cameras are their sizes and a good price-to-performance ratio.

Getting started
To run the device, you must meet certain requirements listed below:
Software
Hardware
- Connectivity: USB 3.0
Demo
In this demo, we'll walk you through using the OAK cameras with ROS 2 via a Docker image. You'll also learn how to visualize data, including image previews and point clouds, using RViz. Demo based on depthai-ros repository.
ROSbot XL with Jetson Orin Nano and OAK-1 Lite.
Start guide
1. Plug the device
For the best performance please use USB 3.0 port, depend of the camera model. Then use lsusb command to check if the device is visible. The Intel Movidius MyriadX should appear.
2. Clone repository
git clone https://github.com/husarion/depthai-docker.git
3. Select demo folder according to the camera model
cd depthai-docker/demo/<demo_name>
| Product | Demo Name |
|---|---|
| OAK-1 | oak-1 |
| OAK-D | oak-d |
4. Run compose.yaml
xhost local:root
docker compose up
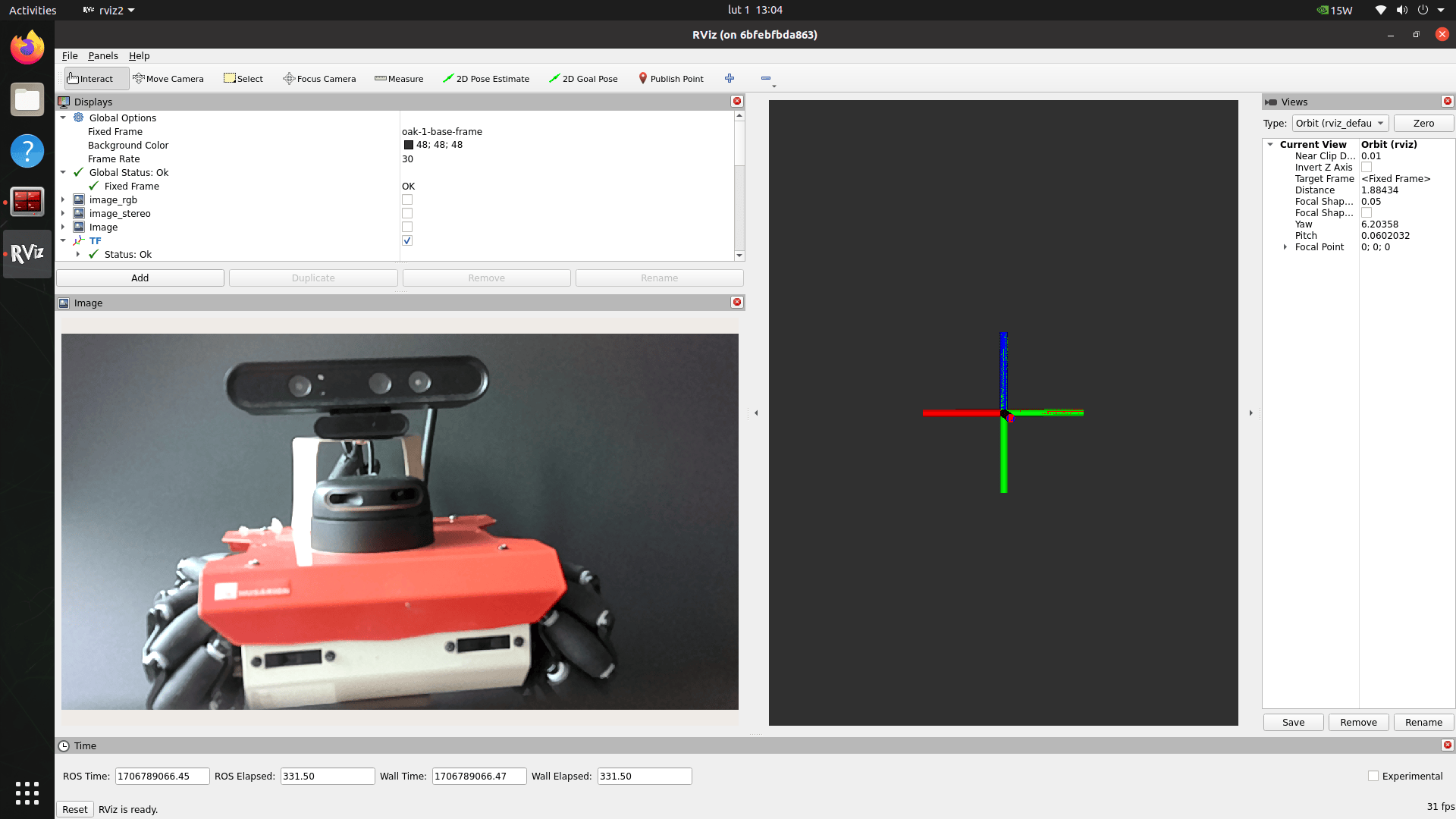
Result
After completing this procedure, RViz should start, containing the RGB image.
ROS API
The full API of the robot can be found in the official documentation of the device.
Summary
This article serves as an excellent introduction to computer vision and AI with OAK cameras within the ROS 2 framework. The demonstration provided by rosbot-xl-telepresence exemplifies the practical application of ROS 2 in the field of mobile robotics.
Need help with this article or experiencing issues with software or hardware? 🤔
- Feel free to share your thoughts and questions on our Community Forum. 💬
- To contact service support, please use our dedicated Issue Form. 📝
- Alternatively, you can also contact our support team directly at: support@husarion.com. 📧