Stereolabs - ZED X camera with Nvidia Jetson Orin Nano
The ZED X is an IP66-rated Global Shutter camera built for robots by Stereolabs, powered by Neural Depth Engine 2. With a robust aluminum enclosure, high-performance IMU, secure GMSL2 connection and external frame sync, it's ready for field operation.
Getting started
To run the ZED X camera with Nvidia Jetson Orin Nano firstly flash the Jetson Orin Nano with the JetPack SDK 5.1.1. To flash the Jetson Orin nano follow the article Installing the System Image for ROSbot. After that you must meet certain requirements listed below:
Software
Hardware
- Single Board Computer: Jetson Orin Nano
- Connectivity: Stereolabs GMSL2 capture card with 2 CSI 22 to 15-pin cables
To connect ZED X to the Jetson Orin Nano follow the official tutorial prepared by Stereolabs Setting up ZED X on Orin Nano / NX Developer Kits.
Demo
In this demo, we'll walk you through using the ZED X camera with ROS 2 via a Docker image. You'll also learn how to visualize data, including image previews and point clouds, using RViz. Demo is based on zed-ros2-wrapper repository.
Start guide
1. Plugin the device
If ZED X camera is connected and the ZED Driver v0.5.4 is installed check the ZED X Kernel module. After reboot on the Jetson Orin Nano go to its terminal and type:
sudo dmesg | grep zedx
The output should contain zedx_links_check: 1 link(s) detected what means everything is well connected. Please do not pay attention to zedx_write_reg:i2c write failed.
2. Clone repository
git clone https://github.com/husarion/zed-docker.git
cd zed-docker/demo
3. Setup environment variable
Before you started it is necessary to setup few variables appropriate to you configuration.
export ZED_IMAGE=husarion/zed-jetson:foxy-4.0.0-20240208-stable
export CAMERA_MODEL=<camera_model>
Replace <camera_model> with appropriate camera model from below table.
| Product Name | Camera Model |
|---|---|
| ZED X | zedx |
| ZED X Mini | zedxm |
4. Run compose.yaml
xhost local:root
docker compose up
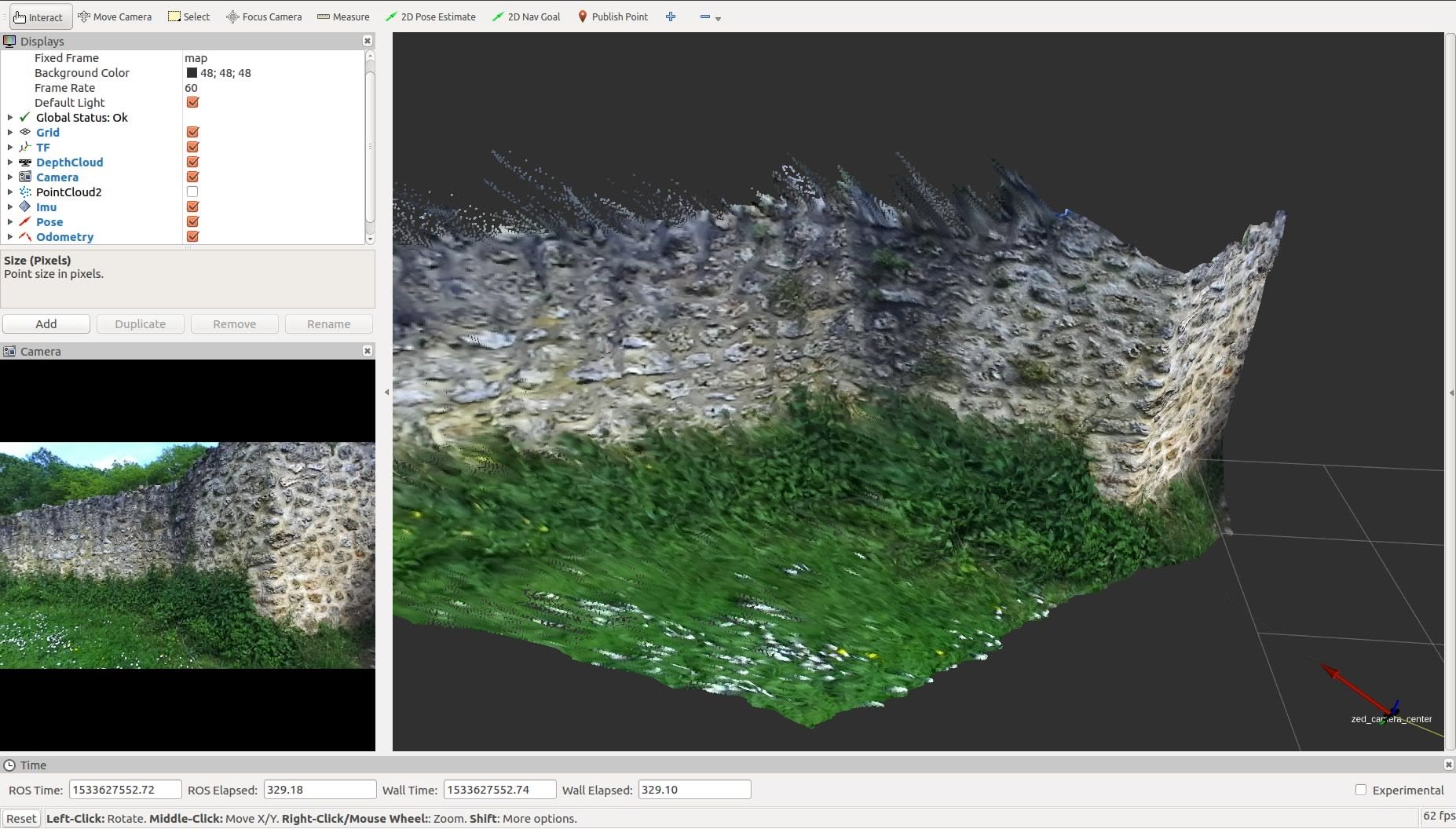
Result
Now you should see a point cloud that defines the position of objects in 3d space, and when you move the camera you should also be able to observe the trajectories of the camera movement.
ROS API
The full API of the robot can be found in the official documentation of the device.
Summary
The depth camera is increasingly the basis of many modern robotic projects. ZED cameras are one of the first depth cameras that use CUDA cores, which allows for such high accuracy while maintaining a large number of frames per second. In addition, ZED officially supports ROS 2 and provides more and more effective solutions.
Need help with this article or experiencing issues with software or hardware? 🤔
- Feel free to share your thoughts and questions on our Community Forum. 💬
- To contact service support, please use our dedicated Issue Form. 📝
- Alternatively, you can also contact our support team directly at: support@husarion.com. 📧