ROSCon 2022 - news from Husarion

As proud members of the global ROS community, Husarion is pleased to support ROSCon 2022 in Kyoto as a Silver Sponsor.
Here is a sneak peek of what you will be able to see at our Booth 11:
- ROSbot XL - premiere of our brand new autonomous mobile robot
- presentation of Panther - an industrial grade, professional UGV dedicated for outdoor environment
- presentation of our partnership with Vulcanexus - great use cases of their software performing on our ROSbot XL.
ROSbot XL
ROSCon 2022 will be the first opportunity to see our brand new ROSbot XL - a universal autonomous mobile robot platform which can be used for various use cases across industries, from prototyping, through development up to production phase.

Hardware architecture
ROSbot XL is a robust alloy construction with 4x4 drive and two wheel options (mecanum and regular wheels). It's a general-purpose small (330 x 280 x 135,5 mm) mobile base designed to be easily integrated with user's components.
We put a lot of effort into making it not only look great, but also be great internally. The block diagram below presents internal circuits of the ROSbot XL.
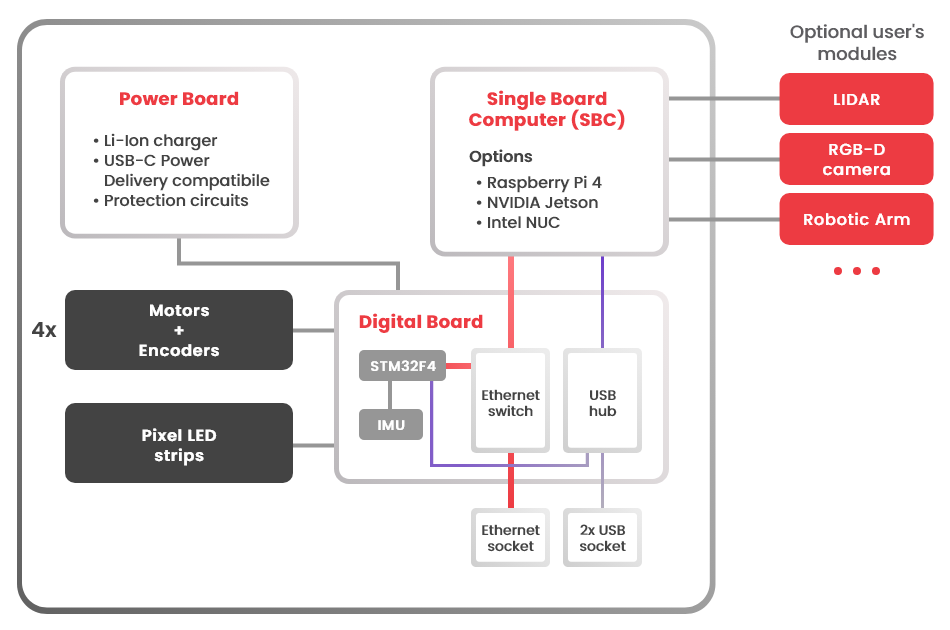
The most interesting features are as follows:
1. Computing platform flexibility
Single Board Computer (SBC) is connected to the robot controller board (called Digital Board) over the Ethernet interface. That provides two main benefits:
- high data rate handled mostly by hardware periphery of STM32F4 microcontroller without wasting MCU computing power.
- Ethernet is common - almost all single board computers have an Ethernet interface, meaning that ROSbot XL can be easily connected to almost any computer - including your laptop - over the cable. Also, there is a lot of space internally and 3 voltage options (5V, 12V, 19V) foreseen for current and future SBCs, enabling you to easily replace the default Single Board Computer (Intel NUC, Raspberry Pi 4 or Nvidia Jetson) with any other SBC, whichever works best for your use case.
SBC and STM32F4 MCU are connected through an Ethernet switch chip with one free slot that is brought out to the rear panel. That means you can easily connect your laptop to the robot and be in the same subnet as STM32F4 MCU and the SBC which makes working with ROSbot XL even more developer friendly.
2. Power supply
ROSbot XL integrates a high capacity 7800mAh, 11V Li-Ion battery pack (86Wh) with protection circuits inside. USB-C Power Delivery input (12-19V) supports simultaneous power delivery and battery charging. The USB-C charger is included in the ROSbot XL set.
The robot is also equipped with a safe power-off circuit - after you push the power-off button, the message is sent over the Ethernet to SBC and triggers a safe shutdown of the whole system.
3. Motors & encoders
4 independent DC motors with quadrature encoders are connected to 4 wheels (4x4 drive). Quadrature encoder data is processed by a dedicated hardware timers of STM32F4 MCU - the hardware timers are being incremented and decremented based on encoders input - which saves processing power even further.
4. Pixel LED strips
ROSbot XL integrates 4 led strips, each with individually addressed RGB pixel LEDs. That means by modifying the open source micro-ROS, FreeRTOS & Arduino based firmware you can easily program your own nice-looking light animations on your mobile robot (for example) based on the state of your system.
Software architecture
Both ROSbot XL ROS 2 package and the microcontroller's firmware are open source and available on GitHub, with ready-to-use GitHub templates for common use cases.
ROSbot XL ROS 2 package is based on ROS control and is used for controlling the kinematics of the mobile robot.
ROSbot XL embedded firmware running on the STM32F4 microcontroller is based on micro-ROS, FreeRTOS, Arduino framework and platformIO to make it as developer friendly as possible.
To make the deployment process easier, we packed ROSbot XL packages (and many others) into Docker images built for ARM64 (eg. Raspberry Pi 4 or Nvidia Jetson) and AMD64 (eg. Intel NUC) architectures. Having Docker installed on Ubuntu is the only requirement to run most of them.
| GitHub repo | description |
|---|---|
| rosbot-xl-navigation-vpn | Autonomous navigation and mapping with the RViz2 control over the VPN. |
| rosbot-xl-teleop-vpn | Controlling the robot from a teleop-twist-keyboard ROS 2 node running on the remote, over-the-internet connected computer. |
| rosbot-xl-gamepad | Controlling ROSbot XL manually by using a gamepad (like Logitech F710 gamepad). |
| rosbot-xl-mapping | Creating a static map of the environment (useful for further AMCL-based non-mapping setups). |
As you can see in the examples above, we provide working setups based on the latest, popular projects from the ROS 2 ecosystem like: Nav2, Slam toolbox, ROS control, micro-ROS or Fast DDS Discovery Server.
The last two ones are especially interesting because they are part of the Vulcanexus ecosystem.
Partnership with Vulcanexus
As Husarion became an official partner of the Vulcanexus project, at our Booth 11 at ROSCon you will have a chance to see the joint power of their software and our ROSbot XL. And here’s another surprise - ROSbot XL was chosen as the official reference mobile robot platform for Vulcanexus - this means there is and will be a lot of Vulcanexus based software projects, tutorials and examples for ROSbot XL.
What is Vulcanexus? Vulcanexus is for ROS 2, what Ubuntu is for Linux - it’s like a new ROS 2 distribution, but with many cool features and tools that improve user experience and support the development of complex robotic systems.
Linux distribution (like Ubuntu, RHEL, Fedora etc.) is a collection of Linux kernel and additional tools, libraries, desktop environments and so forth. So basically the Linux core (called kernel) + other things to make the user's life easier.
Similarly, Vulcanexus is a CORE + other things to make robotic developer life easier. Vulcanexus ecosystem integrates the following modules:
-
CORE - basically it's ROS 2 + Fast DDS - so the same combination as in the latest ROS 2 Humble distro. The unique feature of Fast DDS is that next to the standard DDS discovery mechanism (based on multicasting), it provides ROS 2 Discovery Server mechanism. It's like ROS Master on steroids. It reduces discovery traffic a lot and makes the discovery mechanism more reliable and repetitive - especially for Wi-Fi based setups. If multicasting in the given network is not enabled, then usually the hardcoded peer list is needed to be maintained on each host. That is problematic in case of robotic fleet scaling. Thanks to Discovery Server, only the Discovery Server's address needs to be stored in XML profile files, which makes adding new peers to the network straightforward.
-
MICRO - micro-ROS to put ROS 2 into microcontrollers. ROSbot XL firmware running on STM32F4 microcontroller is based on this project, allowing you to use ROS 2 abstraction at the embedded firmware level. Here's how it works: micro-ROs (running on a microcontroller) connects to the rest of the ROS 2 system by using a micro-ROS Agent (running on the SBC side). Basically this project is for ROS 2, what rosserial was for ROS.
-
TOOLS - this Vulcanexus module contains a set of programs for DDS debugging and performance improvement. The most interesting of them is ROS 2 Monitor which is a Wireshark-like GUI tool for DDS monitoring.
-
CLOUD - thanks to ROS 2 Router it is possible to bridge different ROS 2 domains, using different discovery mechanisms (simple or Discovery Server based) with topic filtering. That can be especially useful for robotic fleets deployment and for running parts of the robotic system in the cloud.
-
SIMULATION - a default simulation tool for Vulcanexus is Webots which is relatively fast and optimized for working in web browsers.
All the mentioned components will be continuously updated by Vulcanexus so you can always take advantage of the latest features and improvements.
Summary
Did we catch your attention? Meet with our team at Booth 11 to learn more about Husarion’s latest ROS/ROS 2 and robotic platform developments like:
- ROSbot XL - our brand new autonomous mobile robot
- Panther - an industrial grade, professional UGV for outdoor environment
- micro-service oriented collection of Docker images and low-latency P2P technologies for next gen robotic fleets.
And when you’re there, don’t hesitate to ask about Vulcanexus and see for yourself how it performs on Husarion's robots. See you!