Lynx wins the Best Radiation Mapping Award at EnRicH 2025

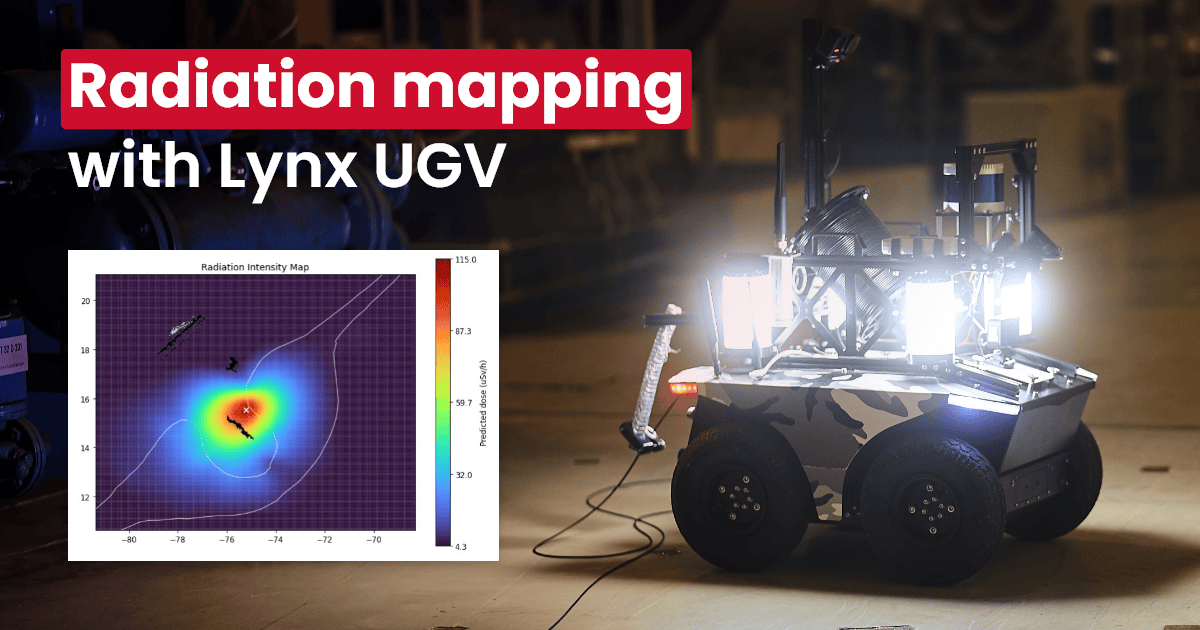
Last month the Husarion team has participated in the EnRicH 2025 robotics hackathon, where we had the opportunity to showcase Husarion Lynx UGV platform in a real-world nuclear accident scenario.
It was really exciting to see our platform in action, and we are proud to announce that we won the Best Radiation Mapping Award!
The event took place in the Zwentendorf nuclear power plant in Austria, built in the 1970s but never put into operation. The plant was decommissioned in 1985, and since 2005, it has been used for training purposes, museum and event venue.

The robotics trial had a practical focus, with tasks centered around search and rescue operations, UAV/UGV cooperation, 3D environment and radiation mapping. Teams from various backgrounds, including not only big industry players, but also smaller companies, academia, and students, participated in the event. What makes this event unique is that it was not just a mock test run, but an event held in a real nuclear power plant, with lots of enclosed spaces, staircases, and other challenging environments. Additionally, the organizers provided a real radiation sources that should be detected, mapped, and avoided during rescue operations.
Lynx photos on the test site were provided by the Fraunhofer FKIE/Fabian Vogl.
Lynx Platform
Our team used the Lynx, which is a compact and versatile Unmanned Ground Vehicle (UGV) platform designed for operation in both indoor and outdoor environments. The platform can be equipped with advanced sensors, including LIDAR, cameras, and even radiation detectors, that allow it to navigate tight spaces and standard doorways effortlessly and perform tasks autonomously.

Wired Communication
For the event, we have equipped the Lynx with a fiber optic cable, that carried telemetry and live visualization of the robot's environment. The setup enabled us to enter and survey rooms with thick concrete walls, where wireless communication would have been impossible. Obstacles on the floor were not a problem for the wire, as lightweight, but durable Kevlar outer shield was an adequate protection against the adverse environment.
The fiber optic cable provided a reliable and high-speed connection, streaming gigabit data in real-time without any problem. Not bridging ROS 2 nodes with wireless link made it more stable and reliable, as we could avoid issues with packet loss and latency that often occur in wireless communication. Other teams had experienced problems with their wireless links and ROS related issues that stemmed from it, which was avoided by the fiber optic cable solution.

Radiation Detectors
Radiation mapping hardware was chosen to be a combination of two detectors: Radiacode 103 and GMC-320. Both detectors were integrated into the Lynx platform, collecting radiation data during the event. As this was a proof-of-concept system, the selected devices were affordable and quality of the data could be easily improved with use of more expensive and certified scintillation detectors. Final data has been collected with the Radiacode, as the GMC-320 did not respond fast enough to changing radiation levels, limiting platform cruising speed far below the selected 1 m/s.
Radiation Mapping
Ionizing radiation during industrial accidents can be a deadly, but invisible danger. First responders need to be aware which areas of the plant are safe for search and rescue operations. Additionally as robots can withstand much higher levels than humans, they can be sent in the field to map potential sources and pinpoint decontamination efforts to a specific place
The generated proof-of-concept maps provide detailed information about the radiation levels in different areas of the power plant. Positional data comes from the robot's LIDAR sensor running the Husarion autonomous navigation stack, which provided the simultaneous localization and mapping (SLAM) capabilities required for building the environment map.
Methodology
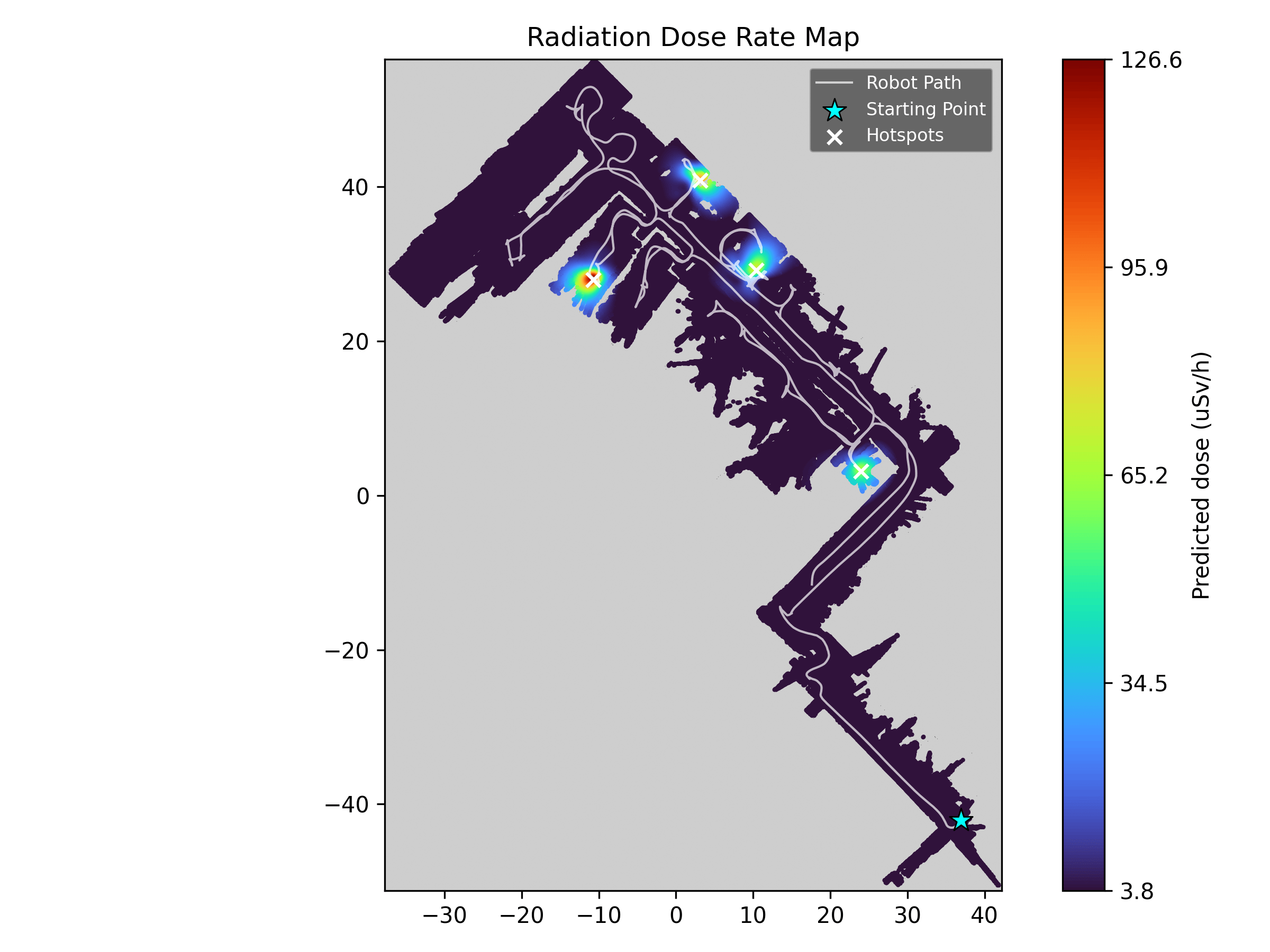
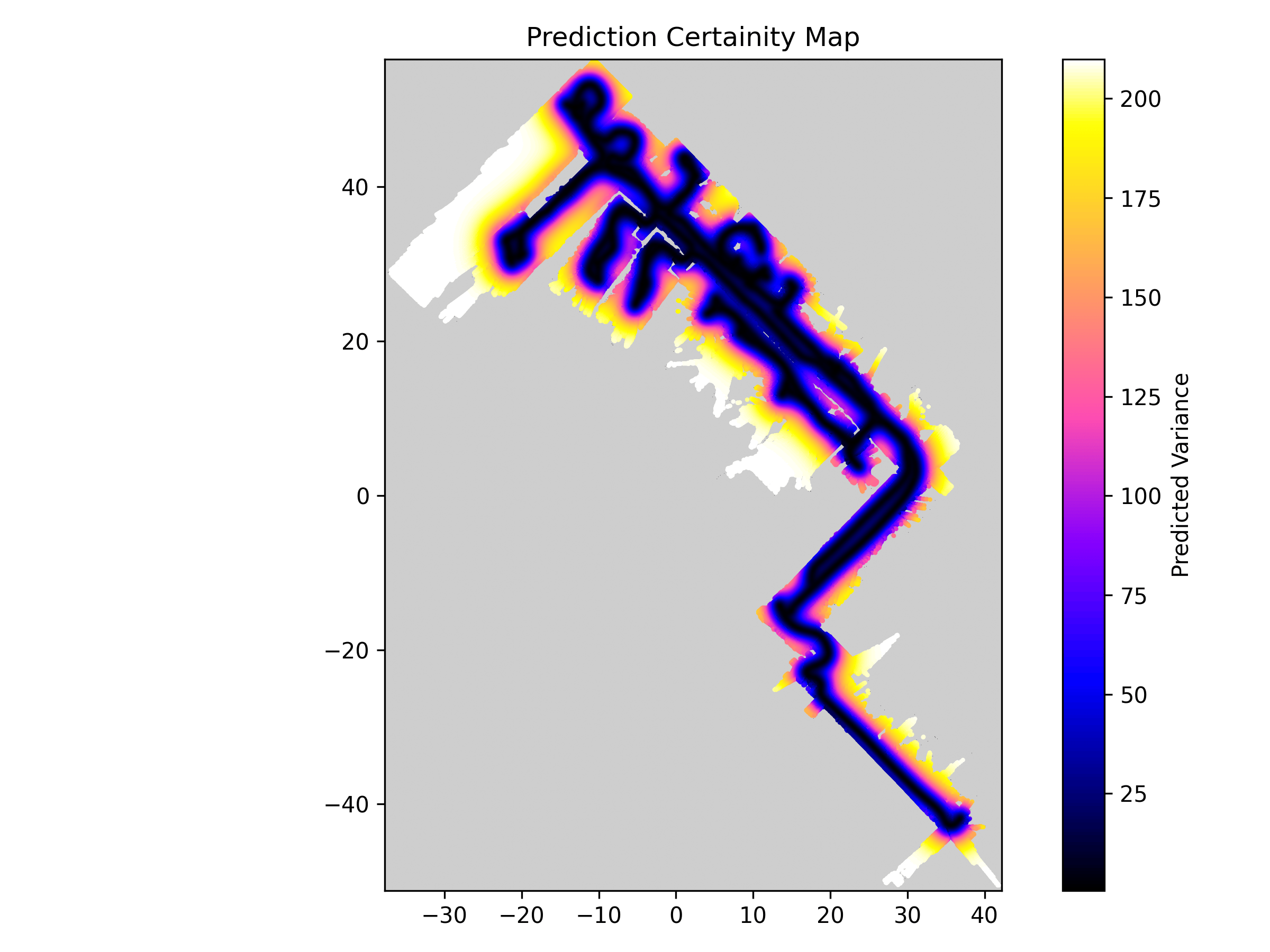
A Gaussian Process Regression algorithm was used to extrapolate recorded radiation level on the robot's path to a full map of the environment. Calculations were speed up by performing them on the GPU, making updates near real-time. Used approach not only predicts levels of radiation in unmeasured areas and locates the source, but also estimates the uncertainty of the prediction (second map). A threshold for the uncertainty can be used to filter out unreliable data, e.g. places that were are too far away from the driven path, which is critical when human lives are at stake.
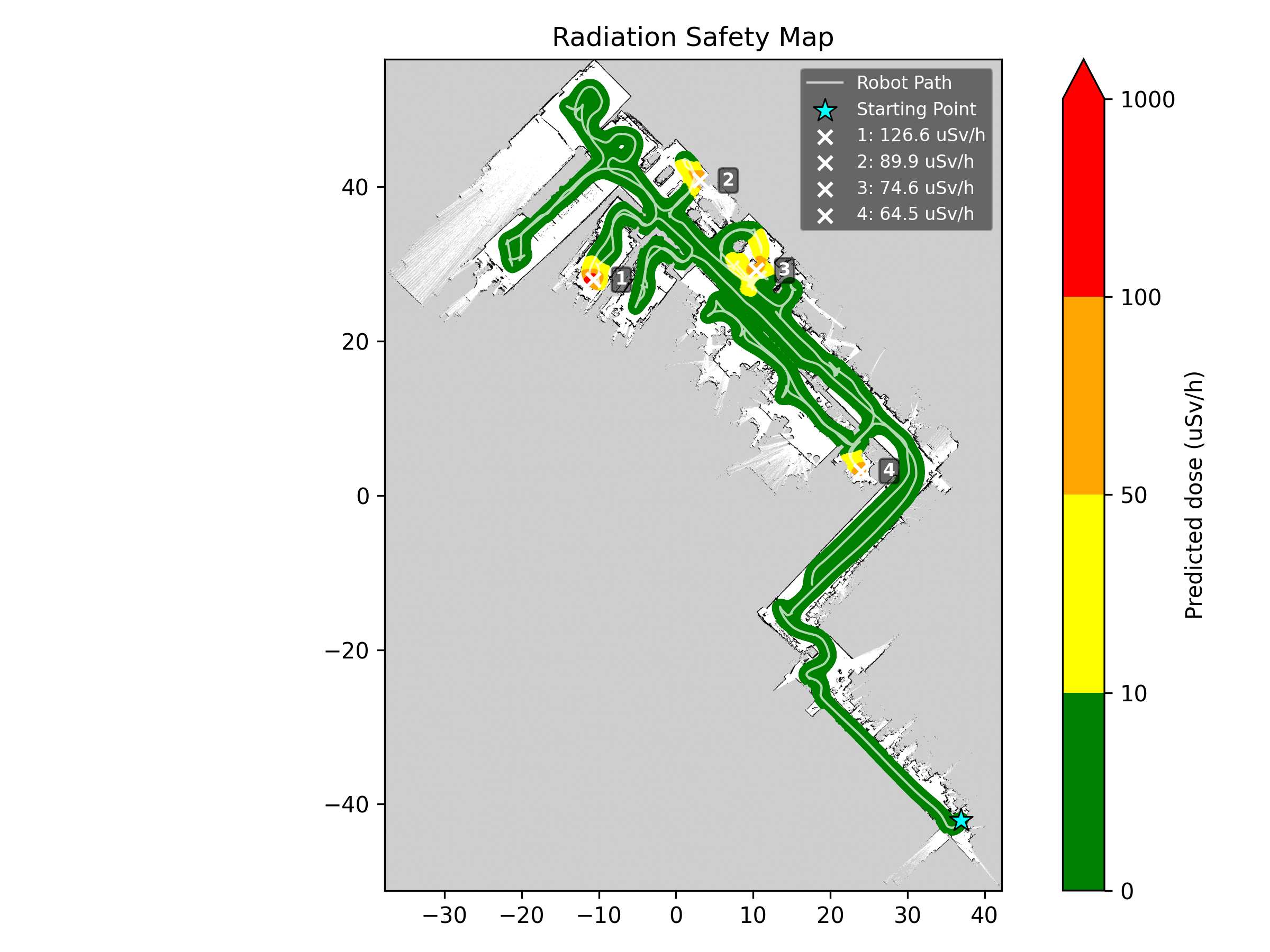
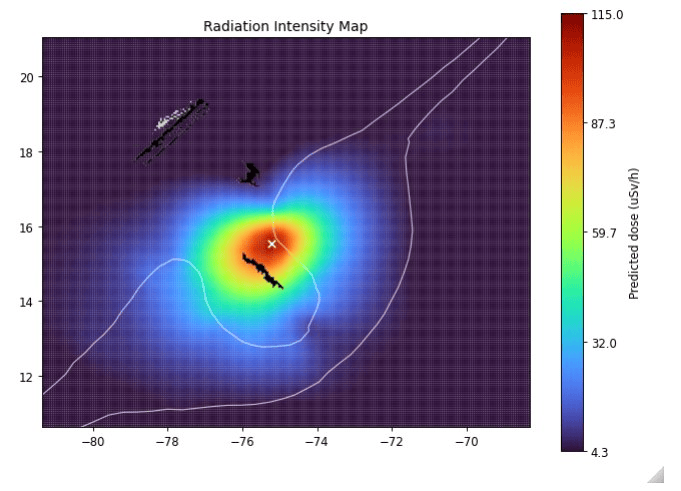
We have employed a typical color-coded heatmap (first map), where red areas indicate high radiation levels and dark blue ones indicate low radiation levels. To allow easier interpretation of the data, an additional safety map has been used, containing thresholded values mapped to five distinct colors (third map). It has helped the team (and theoretical responders) to quickly identify the most dangerous areas and plan their search and rescue actions accordingly.
Accuracy
Following images show one of the props used during the event. Three pipe segments have valves attached that shield the radiation source. Teams with manipulation capabilities can "disable" the radiation source by closing the valves.

From recorded radiation levels on the first picture the algorithm can determine the position of the radiation source, which is then visualized on the map. The second picture shows the radiation map generated by our algorithm, with the radiation source marked in red. It corresponds to the left pipe showcasing the accuracy of our mapping software.

Above methods resulted in high-quality radiation maps, which were crucial for the success of the search and rescue operations. We are proud to announce that our solution was recognized with the best Radiation Mapping Award, highlighting the effectiveness of our approach and the quality of the maps we produced.
Next steps
The EnRicH 2025 event in the Zwentendorf nuclear power plant in Austria was a great opportunity for us to test and showcase Husarion Lynx platform in a real-world radiation mapping scenario. We are excited to explore further applications in this field. If you are interested in learning more about our work or collaborating with us, please reach out!