Introducing the Husarion UGV Configurator

The Husarion UGV Configurator is a simple yet powerful tool that will simplify the way you configure, manage, and interact with your robot platform. It's designed as a Textual User Interface (TUI) application that brings a lot of useful tools in a user-friendly interface.

Continue reading to learn more about its key features, including:
- ROS configuration management
- Modify controller parameters such as velocity limits
- Add URDF components
- Manage and create custom animations
- Restore default configuration
- Driver control
- Restart the driver
- View real-time logs
- Update driver version
- Accessing robot information
- Quick access to robot information such as: robot model, serial number, driver version, etc.
The Design of the Husarion UGV Configurator
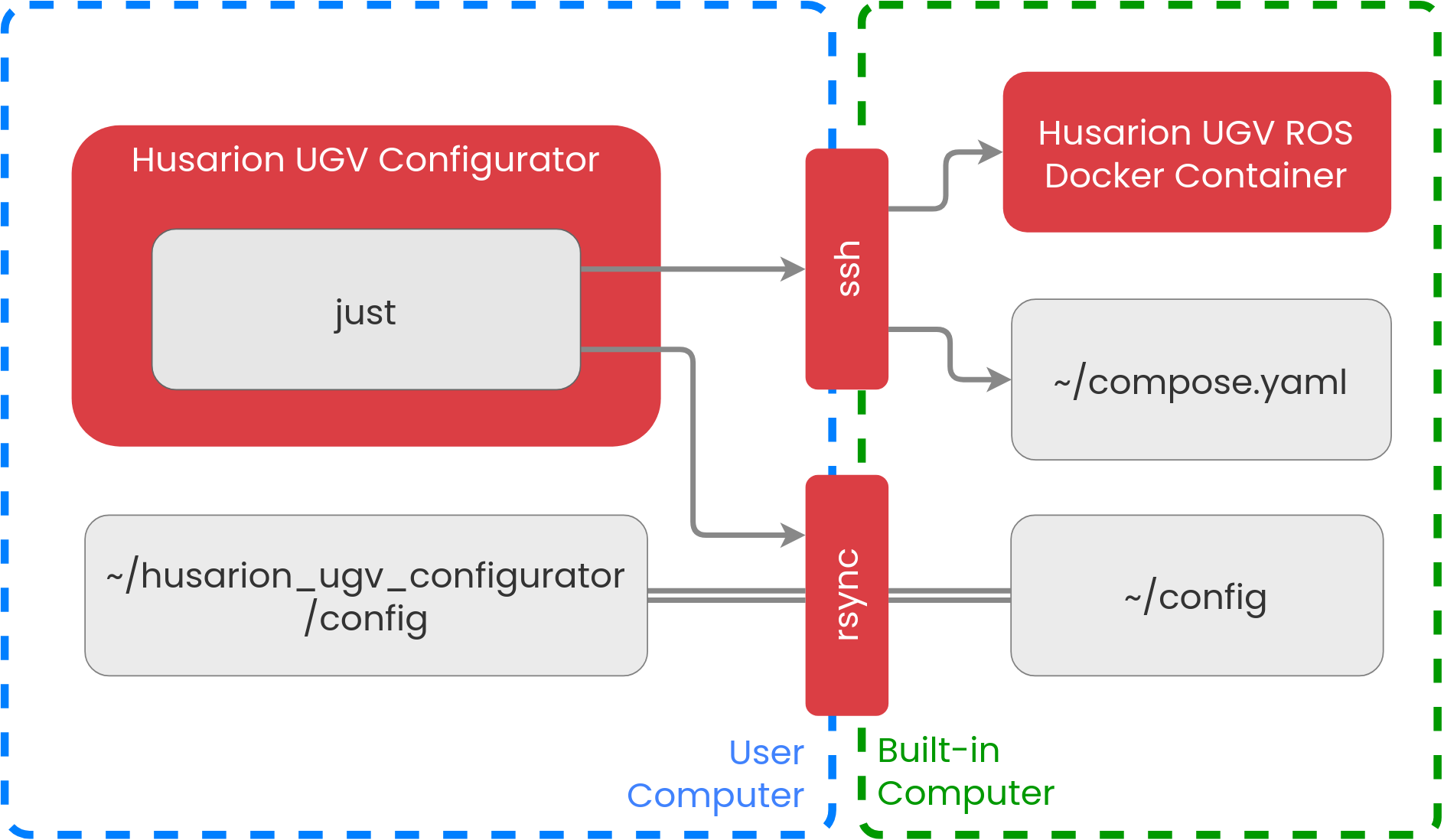
The Husarion UGV Configurator is designed to act as a communication bridge between the Built-in Computer and the User Computer on Panther and Lynx platforms. It leverages simple, reliable tools such as rsync for synchronizing the configuration directory and ssh for managing Docker containers and other remote tasks.
All commands required for configuration and management are wrapped in a just interface, simplifying the process and allowing users to execute tasks either through the TUI or directly from the command line for greater control. In this blog post, we focus on the TUI app. For direct usage of just commands, refer to the Just commands usage guide.
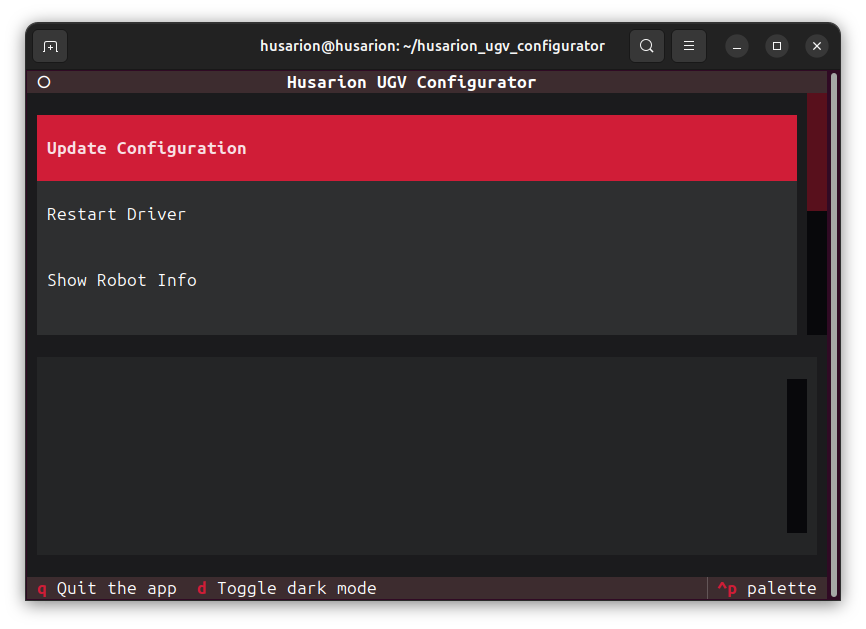
The Textual User Interface (TUI) application is based on the Textual framework. It provides an intuitive interface that wraps just commands, making common tasks easy and accessible for all users.
Key Features of the Husarion UGV Configurator
Updating ROS Configuration
After the installation of the Husarion UGV Configurator, the config directory will appear in the app's directory. This directory contains configuration files for the robot driver located on the Built-in Computer and can be easily synchronized to apply changes to the driver. Managing configuration files is as simple as:
- Modifying relevant files in the local
configdirectory. - Using the Update Configuration option of the configuration to synchronize config files.
- Restarting the driver with Restart Driver option.
There are multiple ways to configure the robot platform. These include:
- Modifying controller parameters – this allows you to change velocity limits, adjust wheel parameters to tweak odometry, and more.
- Adding URDF components – if you have purchased additional components for Panther or Lynx, you can add them to the robot's URDF file.
- Managing and creating custom animations – whether you want to change basic animations to better suit your needs or aesthetic preferences, or completely redesign what and when is displayed on the robot's LED panels, all of this can be done within the configuration files.
- Adjusting ROS network and DDS configuration.
- Changing the robot's default namespace.
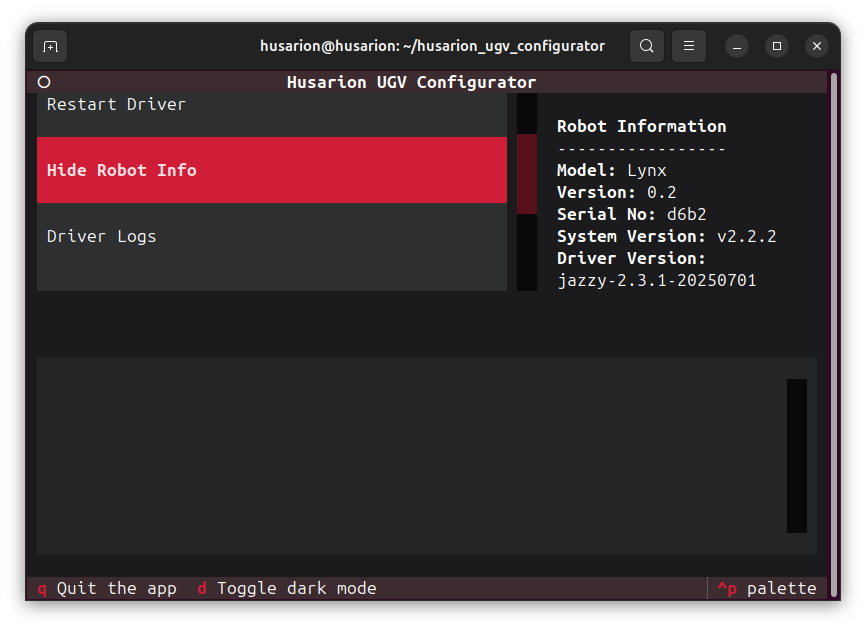
Accessing Robot information
All important robot information is now available with a simple click. You can easily see your UGV platform model and version, serial number, Built-in Computer system version, and currently running software version.
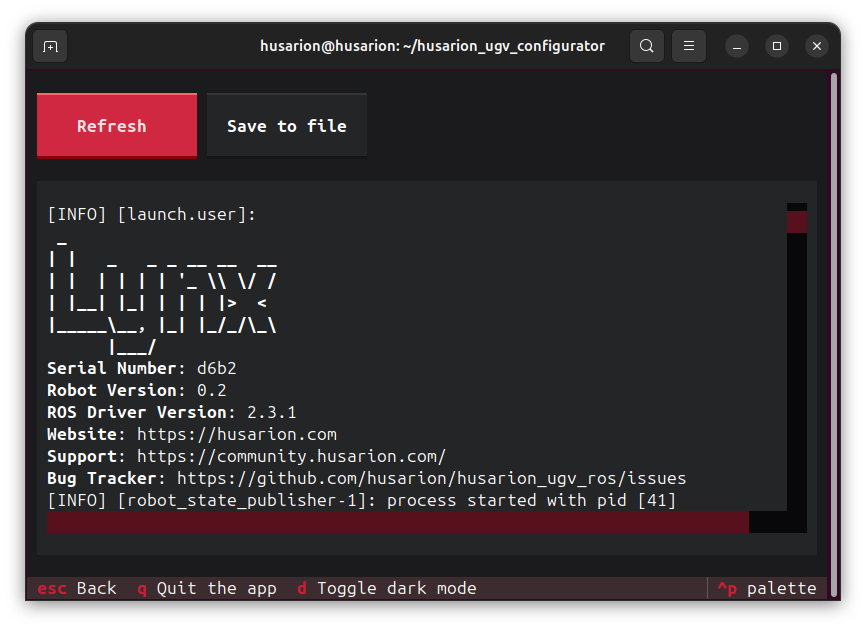
Debugging Driver
Whether you have a problem with the running driver or just want to see what's going on inside your robot's brain. The Husarion UGV Configurator offers a simple way of accessing logs from the driver. It also allows you to save the logs for further analysis or reporting issues.
Updating Driver Version
The software for both Panther and Lynx is being actively developed and maintained. This means that your driver version may get outdated over time. It's worth updating it to access new features and bugs fixed. The update process is straightforward; choose Update Driver Version, then select the desired ROS distribution and driver version. Restart the driver and that's it!
Restoring default configuration
In case you have messed up the configuration or simply want to bring back the driver to its initial state, you may use the Restore Default Configuration option. There are 2 primary modes to bring back the default configuration:
- hard This mode will completely erase all files in the
configdirectory and copy the default ones. Only files in theconfig/commonsubdirectory will be preserved. - soft This mode will not delete any files, but only overwrite the default ones. Other files that have been added to the
configdirectory by the user will be preserved.
Summary
The Husarion UGV Configurator streamlines the management and configuration of Panther and Lynx UGV platforms, offering an intuitive TUI for updating ROS configurations, controlling drivers, accessing robot information, and restoring defaults. Whether you're customizing your robot, updating software, or troubleshooting, this tool makes the process efficient and user-friendly.
Ready to simplify your Panther or Lynx workflow? 👉 Check out the Installation Guide and start using the Husarion UGV Configurator today!
New platforms will have the Husarion UGV Configurator preinstalled on the User Computer and ready to use. Also, if you upgrade your robot's User Computer with the newest Husarion OS, it will automatically install the configurator.
This tool was designed to run on the User Computer of Husarion UGV platforms, but if you are using a Linux-based OS, you can also install and use it directly on your personal computer.