Environment configuration
Using CORE2 with Mbed OS
Mbed OS is free, open-source platform and embedded operating system designed for IoT devices based on Arm Cortex-M family of microcontrollers. It is developed as collaborative project by Arm, its partners and growing community of individual devs from across the world. Mbed OS is distributed under the Apache-2.0 License and it's available on project's GitHub page.
Besides support for variety of boards from different manufacturers the framework has features like:
- built-in support for connectivity options like Bluetooth LE, Wi-Fi, Ethernet, Cellular, LoRa LPWAN, NFC and others,
- RTOS core based on open-source CMSIS-RTOS RTX,
- Hardware Enforced Security and Communications Security,
- easy and portable API.
![]()
First Steps
In this tutorial we will show you how to build, compile and run mbed applications on CORE2 using mbed offline tools. You will be introduced to basics of mbed API, learn how to use rosserial library to connect your mbed application with SBC and more. Let's hack!

Prerequisites
Hardware
- CORE2-ROS (with SBC) or CORE2 and computer running Linux with ROS Kinetic or Melodic. Note that ROSbot 2.0 contain CORE2-ROS inside.
- USB cable if you want to flash code straight from your PC or laptop.
Software prerequisites:
Before we start make sure you have following tools installed on your system:
Required Visual Studio Code extensions:
- Microsoft C/C++ extension (
ms-vscode.cpptools) - Cortex-Debug (
marus25.cortex-debug)
Everything up and ready? Proceed to the next steps then.
Mbed CLI installation
mbed-cli is a package name of Arm Mbed CLI, a command-line tool that enables use of Mbed build system, GIT/Mercurial-based version control, dependencies management and more. Check Mbed CLI GitHub page or Mbed documentation for details about the tool.
To install mbed-cli follow this tutorial from the Mbed documentation.
Installers for both Windows and macOS are provided. Linux users have to install tool manually. In case you are user of the latter system check if you have both Git and Mercurial installed before you start. See Instructions for Linux page for more details.
Check if the installation was successful by running following command in the terminal:
mbed --version
1.10.1
After installation you have to inform Mbed CLI about location of compiler (in our case GCC Arm Embedded Compiler) binaries. We will use global setting. Run:
mbed config -G GCC_ARM_PATH <path to the compiler>
Linux example:
mbed config -G GCC_ARM_PATH /home/szysza/opt/gcc-arm-none-eabi-6-2017-q2-update/bin
Windows example:
where arm-none-eabi-gcc # prints path to arm-none-eabi-gcc.exe if in PATH
mbed config -G GCC_ARM_PATH "C:\Program Files (x86)\GNU Tools ARM Embedded\6 2017-q2-update\bin"
You can check current configuration by running:
mbed config --list
Preparing a workspace
Create a new folder core2-mbed-workspace. It will serve as a workspace for your mbed projects. Run:
mkdir core2-mbed-workspace && cd core2-mbed-workspace
Next step is to import mbed-os library. It will be used by all your projects. In your workspace's folder run:
mbed import mbed-os
[mbed] Working path "E:\mbed_projects\core2-mbed-workspace" (directory)
[mbed] Program path "E:\mbed_projects\core2-mbed-workspace"
[mbed] Importing program "mbed-os" from "https://github.com/ARMmbed/mbed-os" at latest revision in the current branch
Set Mbed OS version to supported by this template:
cd mbed-os
mbed update mbed-os-5.14.1
During Mbed OS installation you can be asked to install additional python libraries. Switch to mbed-os dir and run:
pip install -r requirements.txt --user
Mbed CLI needs to know the path to mbed-os directory. This way all your projects can use one instance of library (default configuration is to have separate instance of library for each project). Run:
mbed config -G MBED_OS_DIR <path to mbed-os>
Example:
mbed config -G MBED_OS_DIR "E:\mbed_projects\core2-mbed-workspace\mbed-os"
[mbed] Working path "E:\mbed_projects\core2-mbed-workspace" (directory)
[mbed] Program path "E:\mbed_projects\core2-mbed-workspace"
[mbed] E:\mbed_projects\core2-mbed-workspace\mbed-os now set as global MBED_OS_DIR
Adding a .mbedignore file
In order to add support for CORE2 target and speed-up building of your projects we will exclude certain folders of mbed-os library from compilation. For this purpose Mbed build system provides .mbedignore files. They have similar structure to .gitignore files used by GIT.
In your local mbed-os library directory create a new file and name it .mbedignore. Open it and add following lines:
features/cellular/*
features/cryptocell/*
features/deprecated_warnings/*
features/lorawan/*
features/lwipstack/*
features/nanostack/*
features/netsocket/*
features/nfc/*
features/unsupported/*
components/wifi/*
components/cellular/*
components/802.15.4_RF/*
components/TARGET_PSA/*
targets/TARGET_STM/TARGET_STM32F4/TARGET_STM32F407xG/device/TOOLCHAIN_GCC_ARM/STM32F407XG.ld
targets/TARGET_STM/TARGET_STM32F4/TARGET_STM32F407xG/device/TOOLCHAIN_GCC_ARM/startup_stm32f407xx.S
Template Project
We will start by setting up a template project. You can use it as starting point for all of your mbed applications.
Just download the zip : https://github.com/husarion/core2-mbed-template/archive/master.zip and extract it in your workspace.
On Linux:
wget https://github.com/husarion/core2-mbed-template/archive/master.zip && unzip master.zip
You can also clone the repository using GIT:
git clone https://github.com/husarion/core2-mbed-template.git
Open the template project in Visual Studio Code. In file setting.json from the directory .vscode in your template, change the value of C_cpp.default.compilerPath to match location of arm-none-eabi-gcc on your system:
Windows:
{
"C_Cpp.default.compilerPath": "C:/Program Files (x86)/GNU Tools ARM Embedded/6 2017-q2-update/bin/arm-none-eabi-g++"
}
Linux:
{
"C_Cpp.default.compilerPath": "/usr/bin/arm-none-eabi-g++"
}
The paths may differ on your system.
This will enable more accurate IntelliSense and remove some error notifications.
Template description
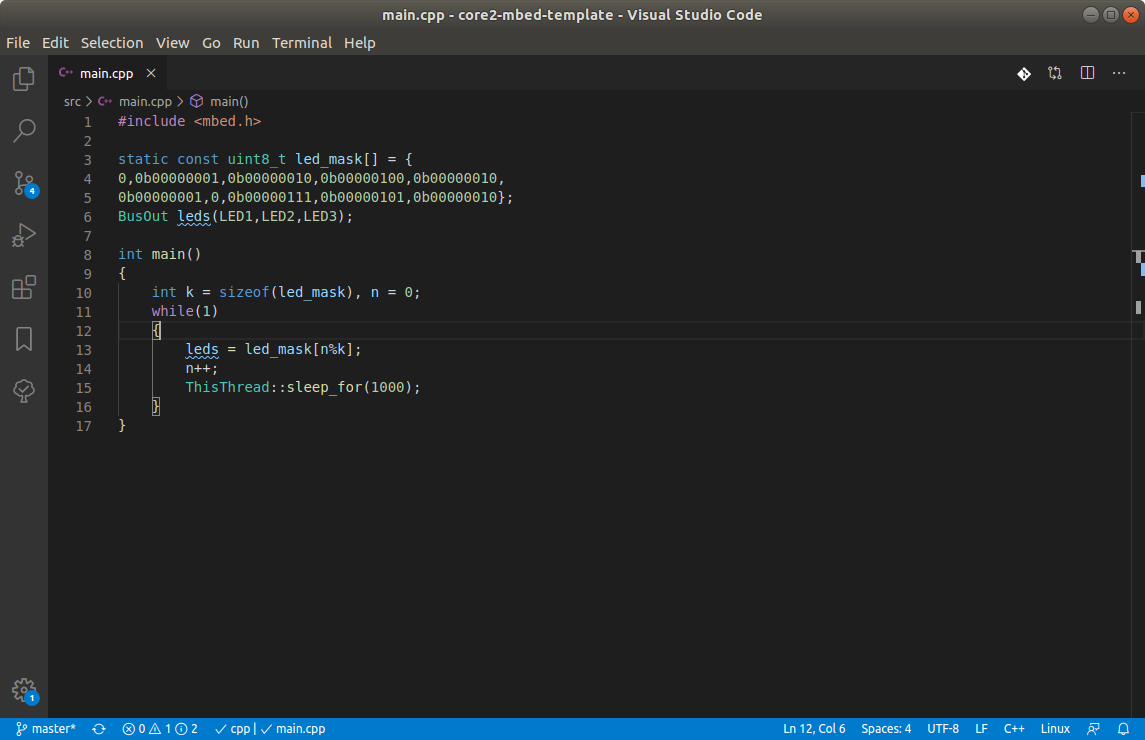
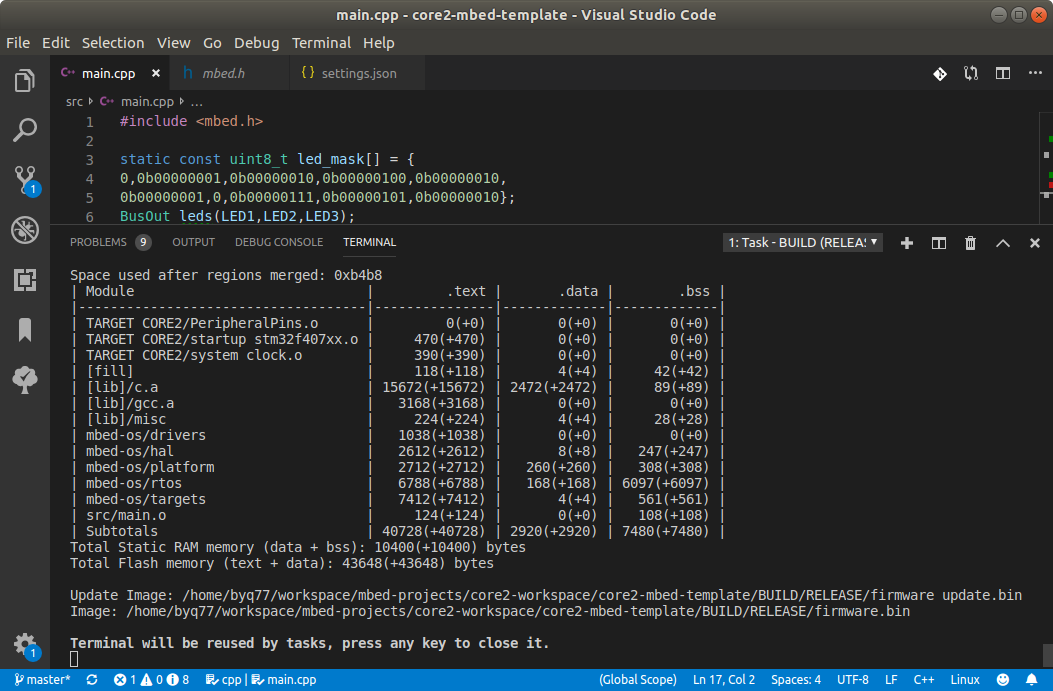
Open the template project's directory and select src/main.cpp. You should see:
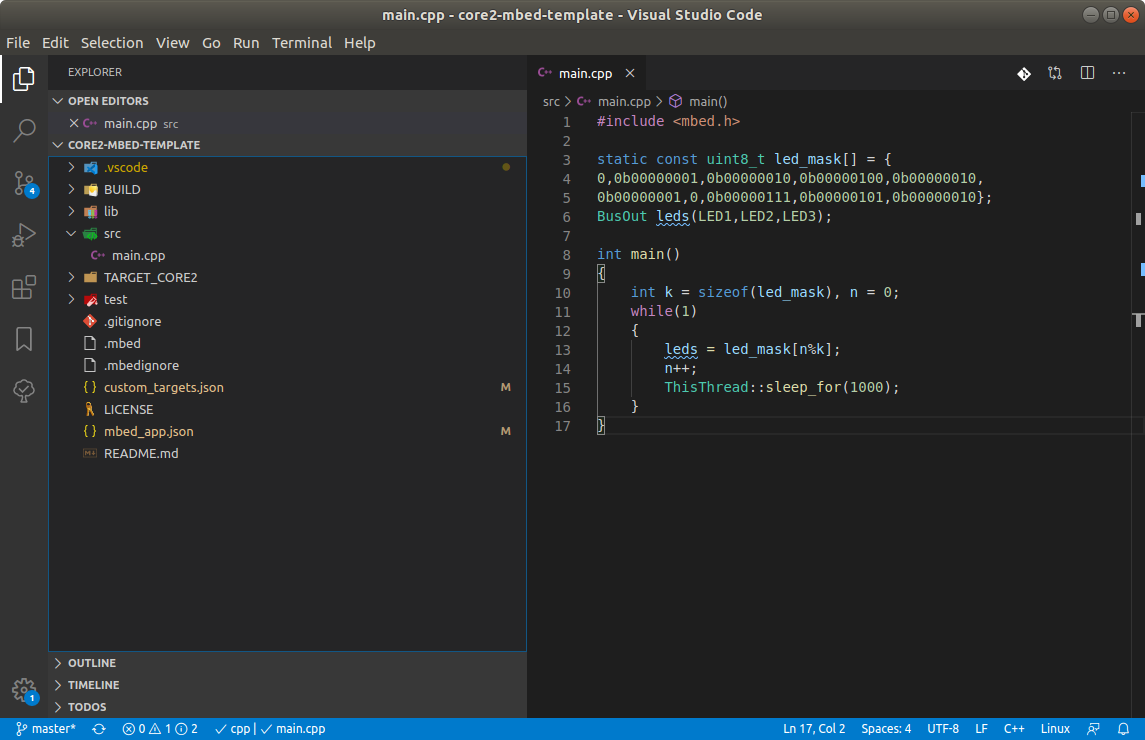
The sample code is very simple. It instantiates a BusOut object that controls multiple GPIOs regardless of ports they belong to. On-board LEDs blink in order described by leds_mask array at the interval introduced by function ThisThread::sleep_for(1000).
In directory's root folder find custom_targets.json file:
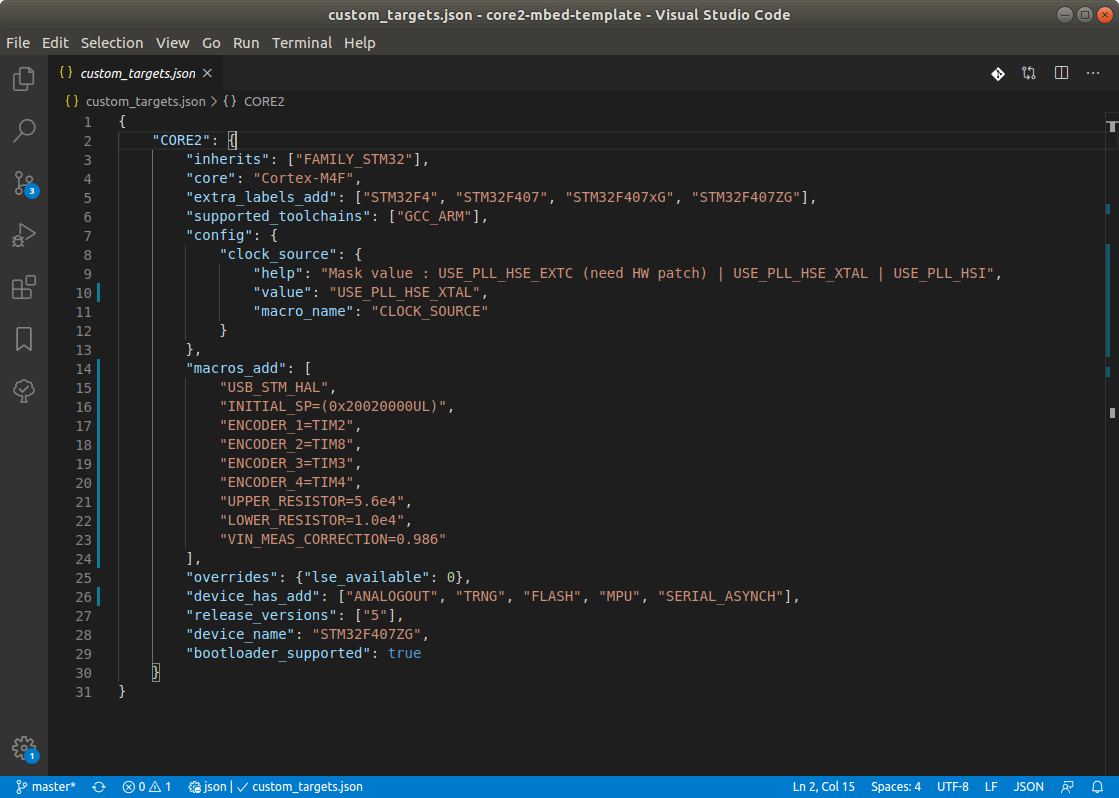
Mbed OS Configuration system uses this file to describe user's custom boards. It allows using Mbed OS with boards that aren't officially supported. We use custom_targets.json and files from TARGET_CORE2 to define CORE2 target. You can learn more about configuration system here.
In the directory TARGET_CORE2 you can find files PinNames.h and PeripheralPins.c. First one defines pin names of mcu and the latter defines peripherals that can be used on each pin.
Another file that is used by Mbed OS configuration system is mbed_app.json. Open it.
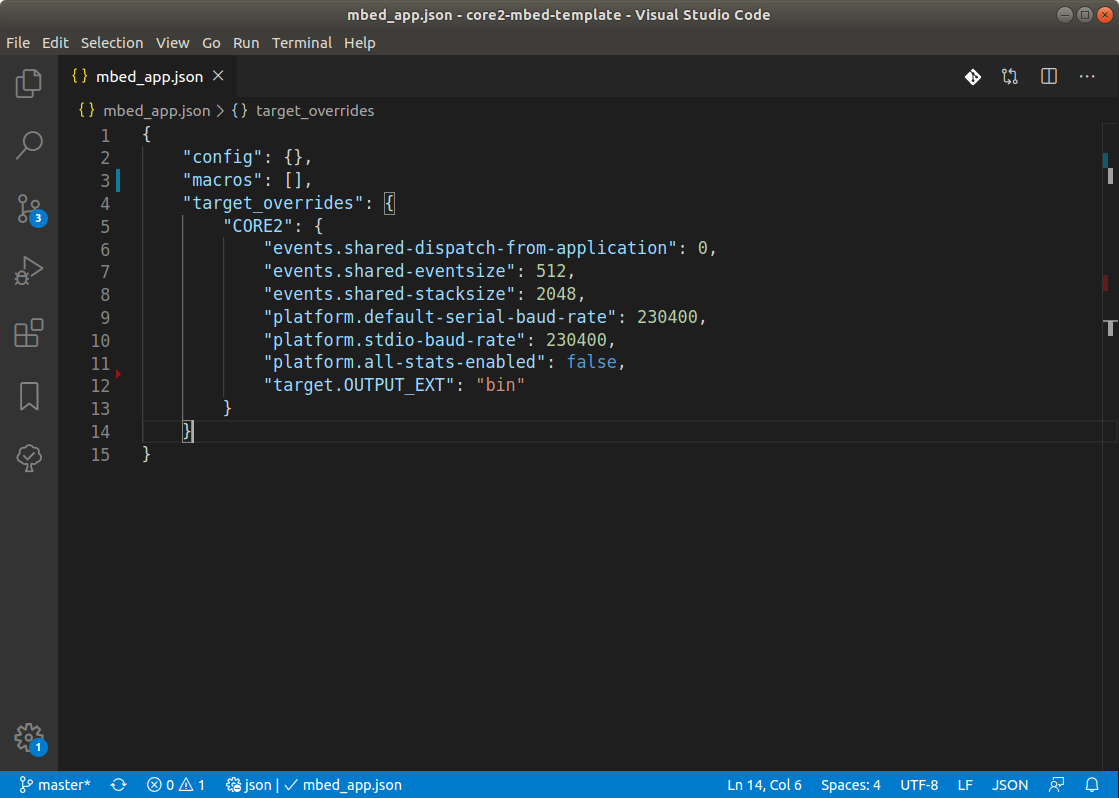
This file is used to configure your application. It allows to override the default configuration of mbed libraries (or your own) for specific targets (tag "target_overrides"). You can also define your own macros that will have global visibility (tag "macros") and create configuration entries (tag "config").
You can also chosee here format of output file. If you want to use stm32loader and program your CORE2 straight from SBC you should leave:
"target.OUTPUT_EXT": "bin"
But if you want to use core2_flasher and USB cable you should change it to:
"target.OUTPUT_EXT": "hex"
You can learn details of your configuration by running following command in the root directory of the template project:
mbed compile --config --source . --source ../mbed-os/ -v
The last file we will check is task.json from .vscode directory. It defines tasks that are recognized by Visual Studio Code IDE. The tasks can be accessed by pressing CTRL + SHIFT + P and typing Task: Run Task in Command Palette.
Building and flashing firmware
Important! If it's your first time with Mbed OS on CORE2 and you have been using Husarion Cloud until now you will need to do one more thing before proceeding. The Husarion Cloud used small program that resided in flash memory before main application called bootloader. This memory area is write protected so you have to use
core2-flashertool to unprotect it:./core2-flasher --unprotect
Press CTRL + SHIFT + B. It will run BUILD (RELEASE) task. Wait until compilation finishes.
Here we have two option of flashing firmware to CORE2.
Flashing using .hex file and core2_flasher
This method was explained in tutorial CORE2 - quick start so if you don't know it yet please check this tutorial.
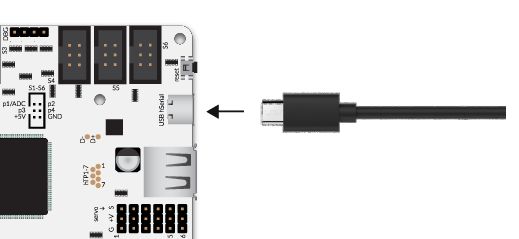
Note! The hSerial port on rear panel of ROSbot is the same port as hSerial on CORE2 visible in the illustration.
Flashing using .bin file and STM32loader
This method is only for CORE2 with SBC connected to hRPi connector (CORE2-ROS or ROSbot's). You don't have to use any additional cables because it's using UART from hRPi connector.
Open console of your SBC. Go to the directory including your .bin file. Next type:
sudo stm32loader -c <your_sbc> -e -w -v firmware.bin
You have to replace <your_sbc> with rpi, tinker or upboard.
Full documentation of STM32loader you can find in our Software section.
Results
If LEDs start blinking like on the animation below then congratulations! You've just successfully built and flashed your first Mbed application for CORE2!
Tasks
- Modify existing application so as the on-board leds blink in Gray code.
- Add Serial to print current sequence to the stdout (micro-usb port on CORE2) at the same time.
- In configuration files change baudrate to 9600.
- Check target's files and learn which UART instance is connected to pins
USBTXandUSBRX.
Rosserial library
If you made it this far you must be really into this stuff! Let's do something more interesting and learn how to communicate with devices running ROS using mbed. For this purpose we will use rosserial for mbed platforms.

Example publisher
First we will create a new project directory. Just simply duplicate template project and name it example-publisher:
cp -rf core2-mbed-template example-publisher
Another way is to create empty mbed project using Mbed CLI. Just type:
mbed new <project-name> --program
After that copy content of template project except .git directory to your newly created program directory.
Tip
If you cloned your template project from online repository and you don't want to have version control in it just delete
.gitdirectory:You can add it latter by running
git init .in root dir of your project.
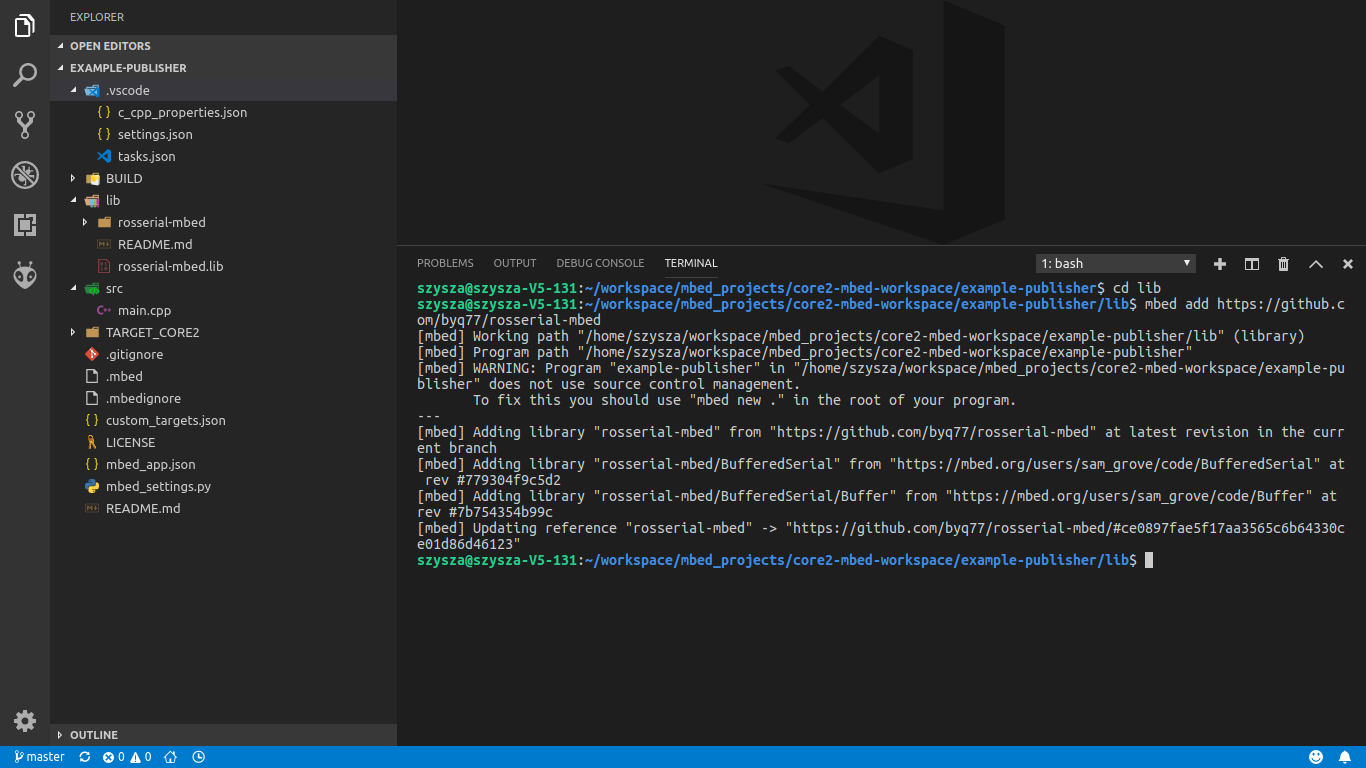
Open example-publisher directory in Visual Studio Code. In the program press CTRL + ~ to open built-in terminal. In the terminal type:
cd lib
mbed add https://github.com/husarion/rosserial-mbed
This will add rosserial-mbed library to your project and download all library's dependencies. Managing libraries this way is simple:
mbed add <library-url>- adds library to project,mbed remove <library-name>- removes library from project.
The code
Take a minute to analyze the program below. We provided you with comments to make it easier.
/*
* main.cpp
*/
#include <mbed.h>
#include <Thread.h>
#define ARRAY_SIZE 4
// This header file must be included before any other
// ros header files.
#include <ros.h>
#include <std_msgs/String.h>
// DigitalOut objects for controlling on-board leds.
DigitalOut led1(LED1,0), led2(LED2,1), ros_led(LED3,0);
// Thread object for controlling ros task. Feature of RTOS.
Thread ros_thread;
// Ticker object for controlling reoccurring interrupt
// that calls attached callback at given rate.
Ticker blinker;
// Node handle instantiation - required for registering publishers, subscribers
// and handling serial communication.
ros::NodeHandle nh;
static const char * messages_array[ARRAY_SIZE] = {
"mbed V5.10", "CORE2", "MCU", "STM32F407ZG",
};
// ros task
void rosThreadCallback(void)
{
std_msgs::String str_msg;
// Instantiate Publisher object with topic name "mbed device".
// Second parameter is reference to instance of object that
// will be used in communication.
ros::Publisher mbed_device("mbed_device", &str_msg);
// Initialize node and advertise our custom topic.
nh.initNode();
nh.advertise(mbed_device);
int i=0;
while(1)
{
ros_led = !ros_led;
str_msg.data = messages_array[i%ARRAY_SIZE];
// publish message to topic
mbed_device.publish(&str_msg);
i++;
// process all messages
nh.spinOnce();
ThisThread::sleep_for(1000);
}
}
void blinkerCallback(void)
{
led1 = !led1;
led2 = !led2;
}
int main()
{
// registering a ros task
ros_thread.start(callback(rosThreadCallback));
// We attach callback to blink leds every 2s
blinker.attach(callback(blinkerCallback),2.0);
}
As you can see the program is pretty straightforward. It creates topic "device_mbed" and publishes messages to it blinking board's leds at the same time.
If you would like to know more about mbed specific code check Mbed API :
Running the code
To get the application working we need to configure library's serial pins and baudrate. You can check default values in rosserial-lib/mbed_lib.json. If you use CORE2 with SBC connected to RPI connector, add this lines to your mbed_app.json file under target_overrides.CORE2 object:
"rosserial-mbed.tx_pin": "RPI_SERIAL_TX",
"rosserial-mbed.rx_pin": "RPI_SERIAL_RX",
"rosserial-mbed.baudrate": "115200"
Your mbed_app.json file should look like this:
{
"config": {},
"macros": [
"ENCODER_1=TIM2",
"ENCODER_2=TIM8",
"ENCODER_3=TIM3",
"ENCODER_4=TIM4",
"UPPER_RESISTOR=5.6e4",
"LOWER_RESISTOR=1.0e4",
"VIN_MEAS_CORRECTION=0.986"
],
"target_overrides": {
"CORE2": {
"events.shared-dispatch-from-application": 0,
"events.shared-eventsize": 512,
"events.shared-stacksize": 2048,
"platform.default-serial-baud-rate": 230400,
"platform.stdio-baud-rate": 230400,
"platform.all-stats-enabled": false,
"rosserial-mbed.tx_pin": "RPI_SERIAL_TX",
"rosserial-mbed.rx_pin": "RPI_SERIAL_RX",
"rosserial-mbed.baudrate": "115200"
}
}
}
Now you can compile the project and flash it to your board. To view communication on your SBC you must disable Husarion Cloud.
If you haven't already disabled husarnet-configurator service please run:
systemctl disable husarnet-configurator
sudo shutdown -r now # it will reboot your SBC
After reboot open terminal and in first tab run roscore. Press CTRL + SHIFT + T and in second tab run:
- Raspberry PI
rosrun rosserial_python serial_node.py _port:=/dev/serial0 _baud:=115200
- Asus Tinker Board
rosrun rosserial_python serial_node.py _port:=/dev/ttyS1 _baud:=115200
- Upboard
rosrun rosserial_python serial_node.py _port:=/dev/ttyS4 _baud:=115200
This will forward your MBED messages to rest of ROS.
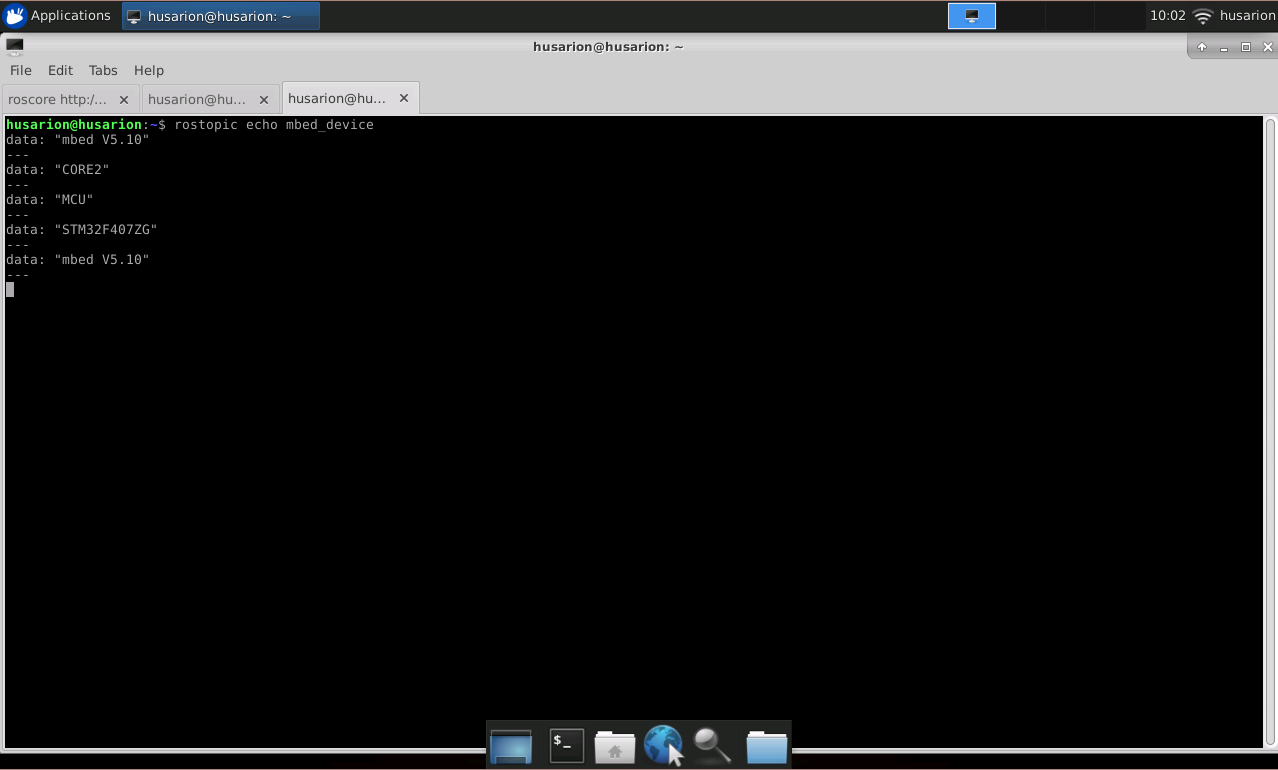
To view communication on "mbed_device" topic open new termina and run:
rostopic echo mbed_device
Example subscriber
In this project we'll use both publisher and subscriber as well as some cryptographic functionality of mbed TLS library . Mbed TLS library include crypto and SSL/TLS capabilities with minimal footprint and easy to use API. It is available as part of Mbed OS.
Like in previous example create a new project and name it subscriber-example.
The code
The example creates two topics - "raw_input" for user to send short String messages to be encrypted by AES-ECB block cipher and "encrypted_output" for user to collect encrypted messages.
/*
* main.cpp
*/
#include <mbed.h>
#include <Thread.h>
#include <ros.h>
#include <std_msgs/String.h>
// header file for AES
#include <mbedtls/aes.h>
#define BLOCK_SIZE 16
// LED1 = PE_2,
// LED2 = PE_3,
// LED3 = PE_4,
// Port masks
enum {
NONE = 0,
L1 = 0b00000100,
L2 = 0b00001000,
L3 = 0b00010000,
L1L2 = 0b00001100,
ALL = 0b00011100
};
uint8_t masks[] = {NONE,L1,L1L2,ALL};
// Controls port E
PortOut leds(PortE,ALL);
Thread ros_thread;
volatile bool message_ready = false;
// variables required for AES encryption ECB mode
mbedtls_aes_context aes;
const uint8_t secret_key[BLOCK_SIZE+1] = "YMZE4oIxB9M14bkF"; // 128-bit key
uint8_t input[BLOCK_SIZE];
uint8_t output[BLOCK_SIZE];
char formatted_output[2*BLOCK_SIZE+1];
void subscriberCallback(const std_msgs::String &raw)
{
// check if length <= 16
int n = strlen(raw.data);
if (n == 0 || n > 16)
return;
memcpy(input, raw.data, n);
// zero padding
for (int i = n; i < BLOCK_SIZE; ++i)
input[i] = 0;
// encrypt message
mbedtls_aes_crypt_ecb(&aes, MBEDTLS_AES_ENCRYPT, input, output);
message_ready = true;
}
void rosThreadCallback(void)
{
ros::NodeHandle nh;
// the output will be formatted string of characters
std_msgs::String str_output;
ros::Publisher pub("output_encrypted", &str_output);
// We instantiate publisher object with "input_raw" topic and attach
// callback for subscriber event (when user sends something).
ros::Subscriber<std_msgs::String> sub("input_raw", subscriberCallback);
nh.initNode();
nh.advertise(pub);
// subscribe to topic
nh.subscribe(sub);
// set aes key
mbedtls_aes_setkey_enc(&aes, secret_key, 128);
while (1)
{
// if message was encrypted send result to topic
if (message_ready)
{
int j = 0;
// format data
for (int i = 0; i < BLOCK_SIZE; ++i)
{
sprintf(formatted_output + j, "%02X", *(output + i));
j += 2;
}
str_output.data = formatted_output;
pub.publish(&str_output);
message_ready = false;
}
nh.spinOnce();
ThisThread::sleep_for(50);
}
}
int main()
{
// registering a ros task
ros_thread.start(callback(rosThreadCallback));
int i = 0, n = sizeof(masks);
while(1)
{
leds = masks[i%n];
i++;
ThisThread::sleep_for(500);
}
}
More about API used:
Running the code
On your SBC open a terminal and in separate tabs start roscore and rosrun rosserial_python serial_node.py bridge with the same parameters like in the previous example.
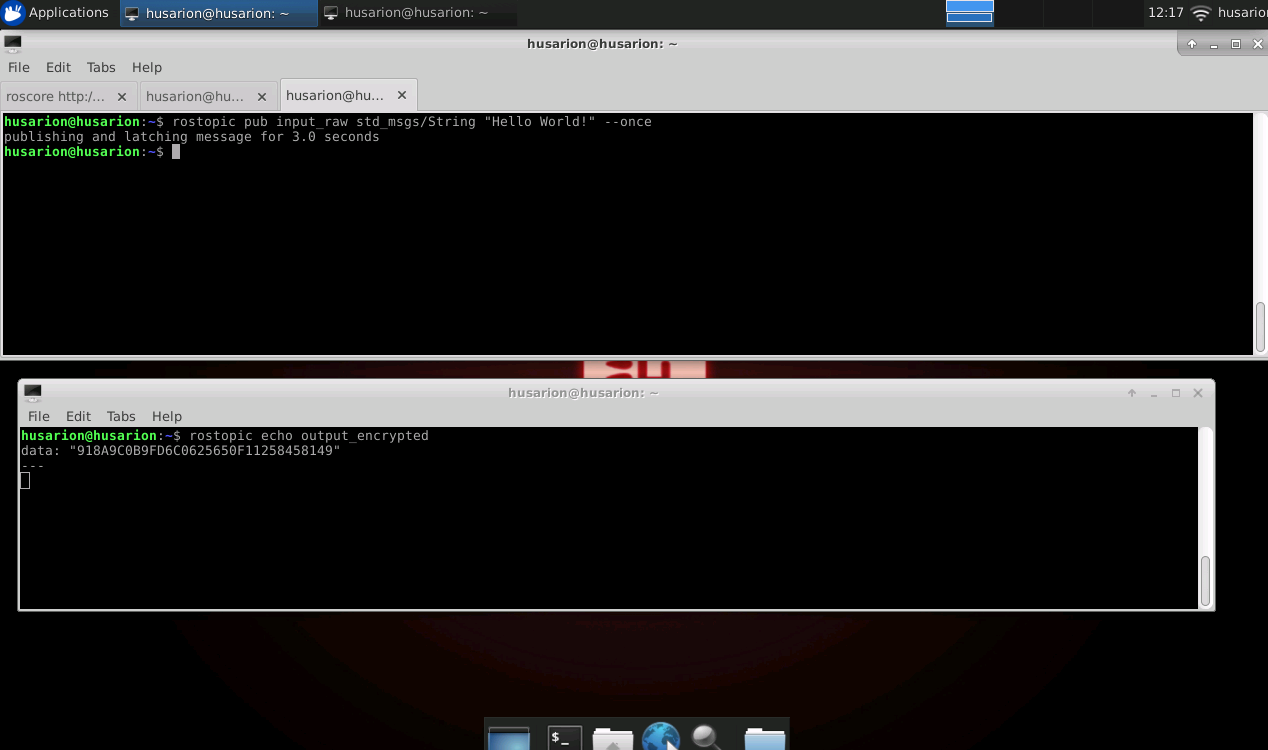
To receive encrypted messages, in a new tab run:
rostopic echo output_encrypted
To publish new message to "input_raw" topic open a new tab and run:
rostopic pub input_raw std_msgs/String "Hello World!" --once
If you want to learn more - check official rosserial mbed tutorials from ros.org.
Tasks
- Create an application that monitors the on-board button and publish the number of pushes to topic "button" every time the button's state changes. Use InterruptIn object.
- Create an application that lights up on-board leds accordingly to the mask value received on "led_mask" topic. Use
std_msgs::Uint8type for ROS communication.
Summary
After completing this tutorial you should know the basics of Mbed OS components and tools. You should be able to create, compile and run mbed applications on CORE2 and use Rosserial library to incorporate your mbed platform into ROS projects.
by Szymon Szantula, Husarion
Need help with this article or experiencing issues with software or hardware? 🤔
- Feel free to share your thoughts and questions on our Community Forum. 💬
- To contact service support, please use our dedicated Issue Form. 📝
- Alternatively, you can also contact our support team directly at: support@husarion.com. 📧