CORE2 - quick start
Preparing hardware
Connect your CORE2 to a DC power supply. The power connector is a standard DC 5.5/2.1 (center-positive), and provides 6 to 16V output. You can use:
- DC adapter
- Li-poly/Li-ion packages - 2S or 3S (e.g. 18650 batteries)
- AA alkaline batteries (4-10 pieces)

Set the power switch to "ON" position and now your device is ready to use!
First Steps
In this tutorial we will show you how to flash mbed applications on CORE2 using Husarion tools. Let's hack!
Hardware
- CORE2 or CORE2-ROS (with SBC)
- USB A ⟷ USB micro cable
Software prerequisites:
Before we start make sure you already downloaded:
We will explain how to use it in next steps of this tutorial
First flashing
The code
Take a minute to analyze the program below. We provided you with comments to make it easier.
#include <mbed.h>
static const uint8_t led_mask[] = {
0,0b00000001,0b00000010,0b00000100,0b00000010,
0b00000001,0,0b00000111,0b00000101,0b00000010};
BusOut leds(LED1,LED2,LED3);
int main()
{
int k = sizeof(led_mask), n = 0;
while(1)
{
leds = led_mask[n%k];
n++;
ThisThread::sleep_for(1000);
}
}
The sample code is very simple. It instantiates a BusOut object that controls multiple GPIOs regardless of ports they belong to. On-board LEDs blink in order described by leds_mask array at the interval introduced by function ThisThread::sleep_for(1000).
The flashing
Before we start extract file husarion-tools.zip which contain few versions of core2-flasher script for different operating system and processor architecture. For example when you use Ubuntu x64 you have use amd64-linux version.
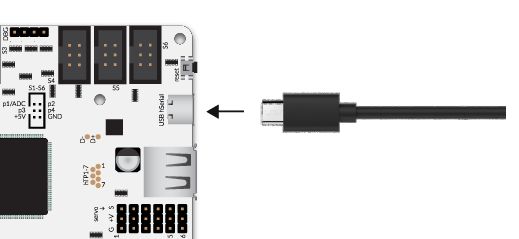
Now let's plug in micro USB cable to USB hSerial port and to your computer.
Open console and run core2-flasher using our example.hex:
.<directory>/core2-flasher <directory>/example.hex
for example:
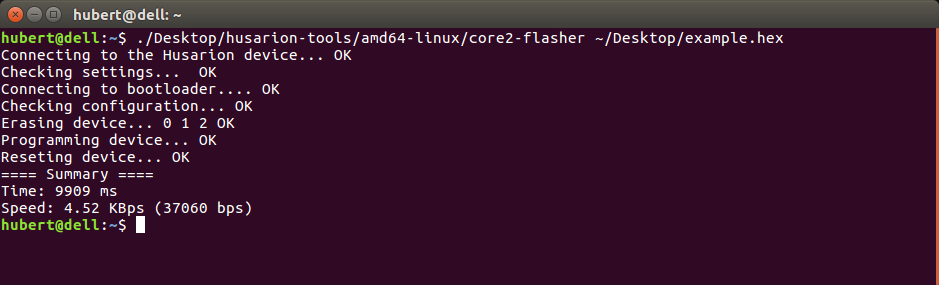
./Desktop/husarion-tools/amd64-linux/core2-flasher ~/Desktop/example.hex
Everything went OK, if you will see output similar to this:
Checking the results
If LEDs start blinking like on the animation below then congratulations! You've just successfully flashed your first Mbed application for CORE2!
Summary
After completing this tutorial you should know how to connect CORE2 to your computer and flash code.
You can go now to next tutorial named Configuration of environment for Mbed to find information how to write and compile your own code based on Mbed.
by Hubert Zwiercan and Szymon Szantula, Husarion
Need help with this article or experiencing issues with software or hardware? 🤔
- Feel free to share your thoughts and questions on our Community Forum. 💬
- To contact service support, please use our dedicated Issue Form. 📝
- Alternatively, you can also contact our support team directly at: support@husarion.com. 📧