manipulation
Manipulation Package
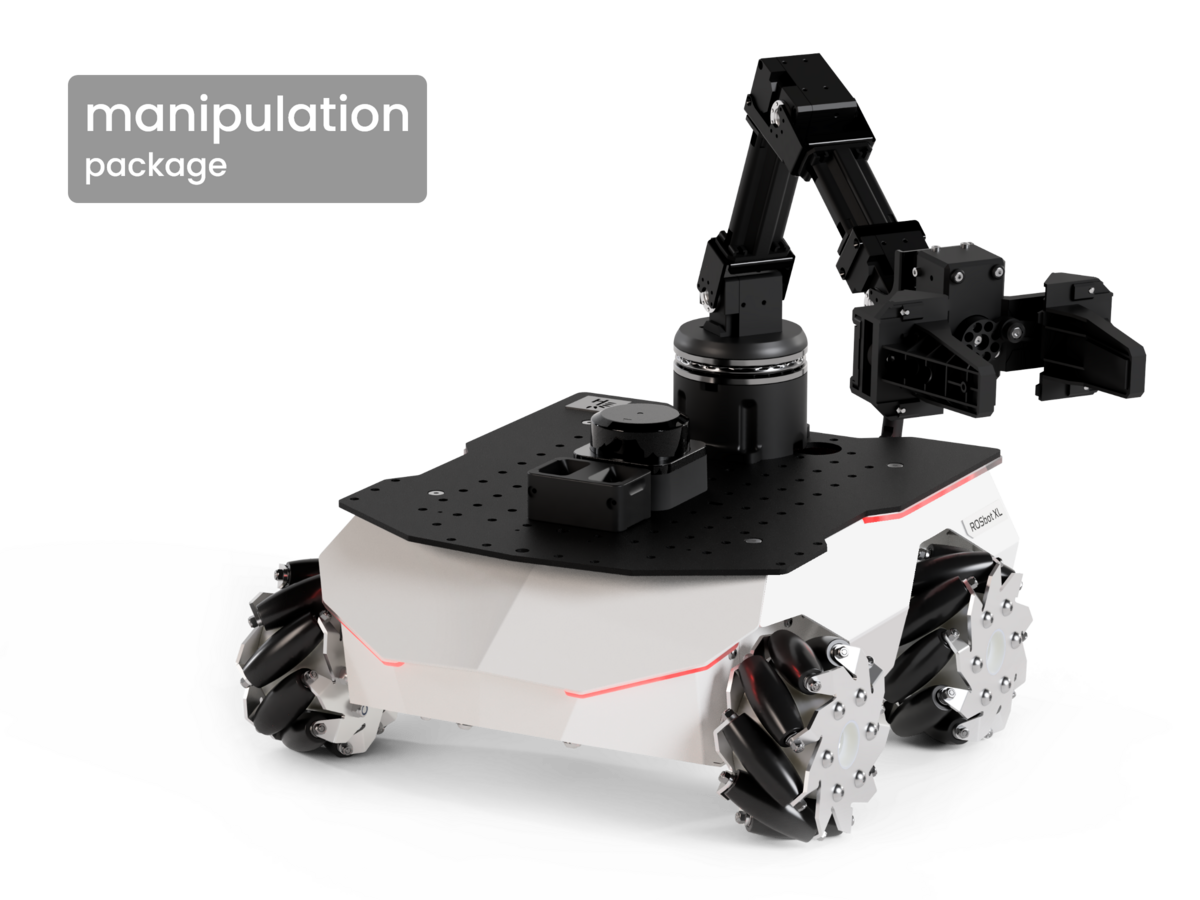
info
Select this package if you are planning to perform mobile manipulation tasks which include autonomous navigation.
Included SBC
| Name | CPU architecture | CPU | RAM | GPU | Storage |
|---|---|---|---|---|---|
| ASUS NUC (NUC13ANKi3) | x86-64 | Intel Core i3-1315U 6 x 4.5 GHz | 16 GB | Intel® UHD Graphics | 250 GB SSD |
Additional Equipment
- SLAMTEC RPLIDAR S3
- OpenMANIPULATOR-X manipulator with a gripper by Robotis
- Control board for the manipulator
- Manipulator holder with a bearing
- Logitech F710 gamepad
Assembly Guide ⚙️
The LiDAR and the manipulator have to be assembled to the robot before use. Please follow the assembly guide.
Reference Projects
| link | description |
|---|---|
| rosbot-xl-gamepad | Control the robot manually using a Logitech F710 gamepad |
| rosbot-xl-autonomy | Autonomous mapping & navigation demo for ROSbot XL. Using navigation2 and slam_toolbox |
| rosbot-xl-manipulation | Using ROSbot XL with OpenMANIPULATOR-X. Read more about this project in the dedicated tutorial (including Gazebo simulation) |