Using frontier exploration
You can run this project on:
Please note, that from the time when this tutorial was prepared, maintained ROS distro was Kinetic which is no longer supported. It can be outdated, and you may face issues with this tutorial.
Before start
This project can be done only on ROS Kinetic due to API change since ROS Melodic.Frontier exploration Project seems not to be developed anymore so we can't provide well tested instruction how to use this. If you want to explore and have ROS Melodic please refer to Tutorial 10. Exploration
Introduction
Environment exploration task is to determine robot desired positions in such a sequence which gives as much information regarding environment as possible. One of the approaches for this task is to frontiers of occupancy grid. As a frontier we define line between free space ant territory marked as unknown. Moving towards frontiers, unknown area can be explored and marked as free or occupied and frontiers are moved into an unknown territory. Process is repeated until all frontiers are investigated, this means free area must be surrounded by occupied cells.
We have prepared ready to go virtual environment with end effect of following project. It is available on ROSDS:

Environment exploration in ROS
In ROS it is possible to explore environment with use of occupancy grid
frontiers. One of the nodes, that perform this task is explore_server
node from frontier_exploration package. This node uses occupancy grid
e.g. created by slam_gmapping and publishes goal position to
/move_base/goal topic subscribed by path planner e.g. move_base
node.
Requirements regarding robot
Before continuing with explore_server node certain requirements must
be met, robot should:
-
subscribe
/move_base/goaltopic with message typegeometry_msgs/PoseStampedin which robot desired positions are included. -
Publish map to
/maptopic with message typenav_msgs/OccupancyGrid
Above configuration is met by the robot created in previous manual.
Moreover, we will use explore_client node from frontier_exploration
package, this will make easier to define exploration area through
rviz.
Configuration of explore_server node
Based on occupancy grid, explore_server node determines frontiers
between free and unknown area and using them determines robot
destinations. It is necessary to define some parameters for
explore_server before running it.
Begin with robot outline, transform tolerance, update and publish frequency, map coordinate frame name, robot coordinate frame name, resolution and define if map should follow position of robot, these parameters have the same meaning as for trajectory planning:
footprint: [[0.12, 0.14], [0.12, -0.14], [-0.12, -0.14], [-0.12, 0.14]]
transform_tolerance: 5
update_frequency: 5
publish_frequency: 5
global_frame: map
robot_base_frame: base_link
Define what kind of map layers to use:
plugins:
- {name: static, type: "costmap_2d::StaticLayer"}
- {name: explore_boundary, type: "frontier_exploration::BoundedExploreLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
Parameters for static map layer, map topic name and define if map can change:
static:
map_topic: /map
subscribe_to_updates: true
Parameters for exploration boundaries layer:
explore_boundary:
resize_to_boundary: false
frontier_travel_point: "middle"
explore_clear_space: false
Parameters meaning:
-
resize_to_boundary- Defines if cost map should be resized to boundaries of search region. -
frontier_travel_point- While defining next destination, which fragment of frontier to choose, could beclosestto robot,middleof frontier orcentroidof all frontier points. -
explore_clear_space- Defines if exploration node should explore space marked as clear or only unknown space.
Parameters for obstacles inflation layer, define inflation radius:
inflation:
inflation_radius: 0.5
Your final file should look like below:
footprint: [[0.12, 0.14], [0.12, -0.14], [-0.12, -0.14], [-0.12, 0.14]]
transform_tolerance: 5
update_frequency: 5
publish_frequency: 5
global_frame: map
robot_base_frame: base_link
plugins:
- {name: static, type: "costmap_2d::StaticLayer"}
- {name: explore_boundary, type: "frontier_exploration::BoundedExploreLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
static:
map_topic: /map
subscribe_to_updates: true
explore_boundary:
resize_to_boundary: false
frontier_travel_point: "middle"
explore_clear_space: false
inflation:
inflation_radius: 0.5
Save it as exploration.yaml in tutorial_pkg/config directory.
Launching exploration task
To test above configuration you will need to run explore_server node
with nodes from path planning configuration.
To remind, you will need to run following nodes:
-
CORE2bridge node -roslaunch rosbot_ekf all.launch- publishes tf, connect to CORE2 and run extended Kalman filter for odometry. -
rplidarNode- driver for rpLidar laser scanner
Or instead of these, Gazebo:
roslaunch rosbot_gazebo maze_world.launch
And:
-
static_transform_publisher-tfpublisher for transformation of laser scanner relative to robot -
slam_gmapping- map building node -
move_base- trajectory planner -
explore_server- exploration task -
explore_client- node for defining exploration area -
rviz- visualization tool
For the explore_server node you will need to specify some parameters
and paths for .yaml configuration files:
<node pkg="frontier_exploration" type="explore_server" name="explore_server" output="screen">
<param name="frequency" type="double" value="1.0"/>
<param name="goal_aliasing" type="double" value="0.5"/>
<rosparam ns="explore_costmap" subst_value="true" file="$(find tutorial_pkg)/config/exploration.yaml" command="load" />
</node>
Parameter frequency defines how often new goal should be recalculated
and goal_aliasing defines last goal and new goal before it is
published to trajectory planner.
You can use below launch file:
<launch>
<arg name="use_rosbot" default="true"/>
<arg name="use_gazebo" default="false"/>
<include if="$(arg use_gazebo)" file="$(find rosbot_gazebo)/launch/maze_world.launch"/>
<include if="$(arg use_gazebo)" file="$(find rosbot_gazebo)/launch/rosbot.launch"/>
<param if="$(arg use_gazebo)" name="use_sim_time" value="true"/>
<node if="$(arg use_rosbot)" pkg="rplidar_ros" type="rplidarNode" name="rplidar">
<param name="angle_compensate" type="bool" value="true"/>
<param name="serial_baudrate" type="int" value="115200"/><!--model A2 (ROSbot 2.0) -->
<!--<param name="serial_baudrate" type="int" value="256000"/>--><!-- model A3 (ROSbot 2.0 PRO) -->
</node>
<!-- ROSbot 2.0 -->
<include if="$(arg use_rosbot)" file="$(find rosbot_ekf)/launch/all.launch"/>
<!-- ROSbot 2.0 PRO -->
<!-- <include file="$(find rosbot_ekf)/launch/all.launch" >
<arg name="rosbot_pro" value="true" />
</include> -->
<node pkg="tf" type="static_transform_publisher" name="laser_broadcaster" args="0 0 0 3.14 0 0 base_link laser_frame 100" />
<node pkg="rviz" type="rviz" name="rviz"/>
<node pkg="gmapping" type="slam_gmapping" name="gmapping">
<param name="base_frame" value="base_link"/>
<param name="odom_frame" value="odom" />
<param name="delta" value="0.1" />
</node>
<node pkg="move_base" type="move_base" name="move_base" output="screen">
<param name="controller_frequency" value="10.0"/>
<rosparam file="$(find tutorial_pkg)/config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find tutorial_pkg)/config/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find tutorial_pkg)/config/local_costmap_params.yaml" command="load" />
<rosparam file="$(find tutorial_pkg)/config/global_costmap_params.yaml" command="load" />
<rosparam file="$(find tutorial_pkg)/config/trajectory_planner.yaml" command="load" />
</node>
<node pkg="frontier_exploration" type="explore_client" name="explore_client" output="screen"/>
<node pkg="frontier_exploration" type="explore_server" name="explore_server" output="screen">
<param name="frequency" type="double" value="1.0"/>
<param name="goal_aliasing" type="double" value="0.5"/>
<rosparam ns="explore_costmap" subst_value="true" file="$(find tutorial_pkg)/config/exploration.yaml" command="load" />
</node>
</launch>
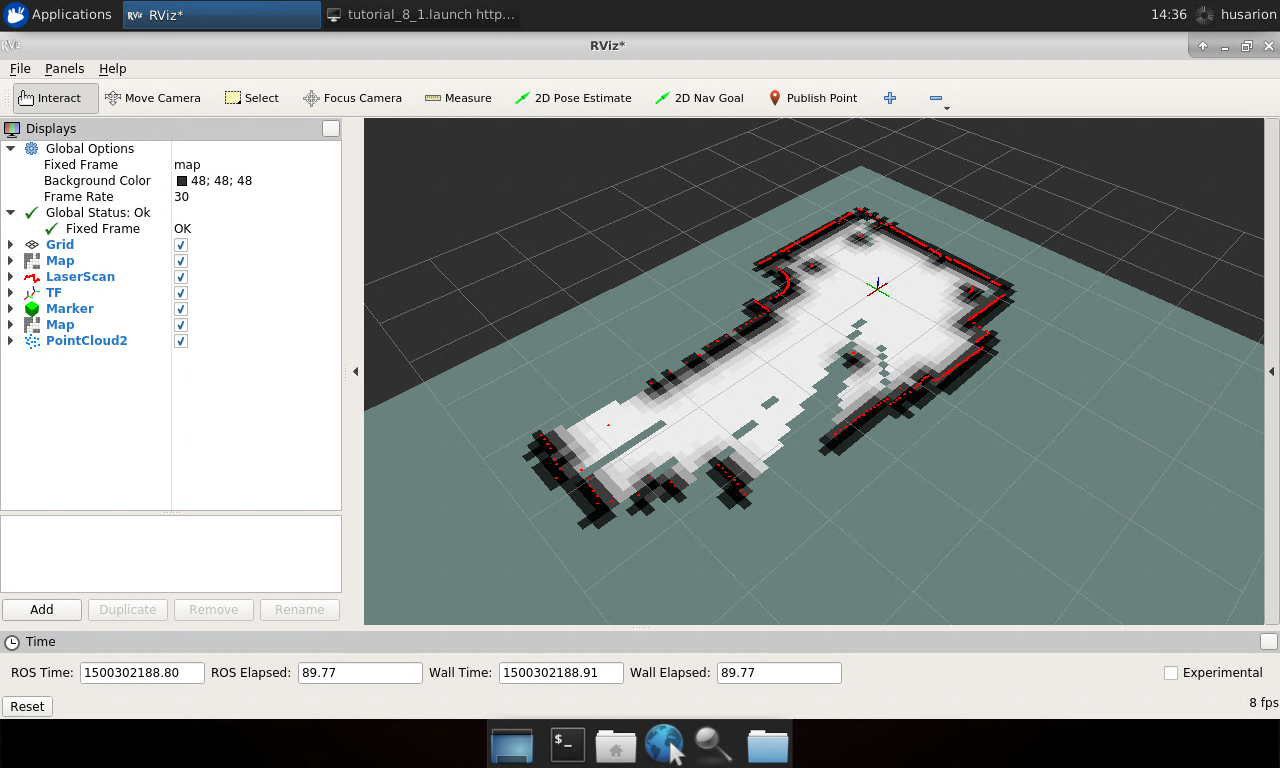
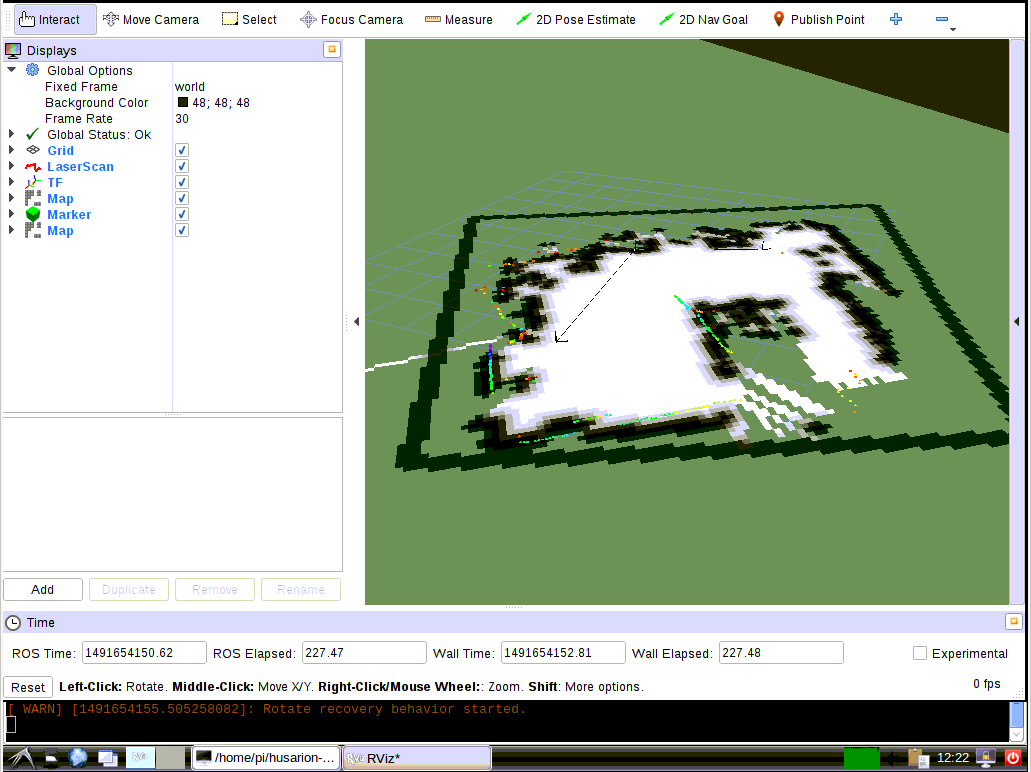
Setting the exploration area
The easiest way to set exploration area is to use rviz. Go to it and
add some objects to visualize:
-
/scan/LaserScan -
/map/Map -
/exploration_polygon_marker/Marker- this will help you with defining exploration area -
/explore_server/explore_costmap/costmap/Map- this will show area to explore -
/explore_server/explore_costmap/explore_boundary/frontiers/PointCloud2- this will show frontiers found in the area
You can also add Tf visualization, but it is not necessary for proper
operation.
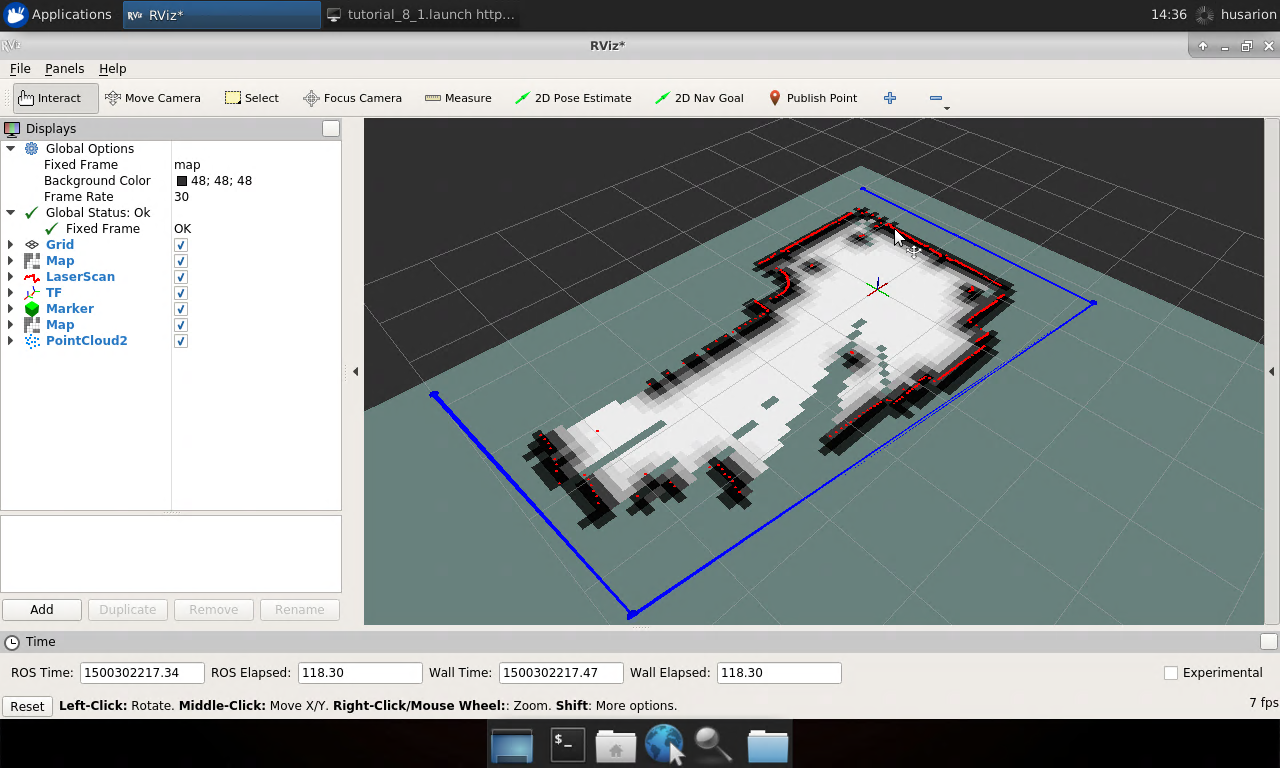
From toolbar select Publish Point button and click in visualization
window, this will be first corner of exploration area, select
Publish Point button again and choose second corner of exploration
area, they will be connected by blue line. Continue until desired area
is surrounded by lines.
To finish defining exploration region set last point at the position of first corner, line will become red.
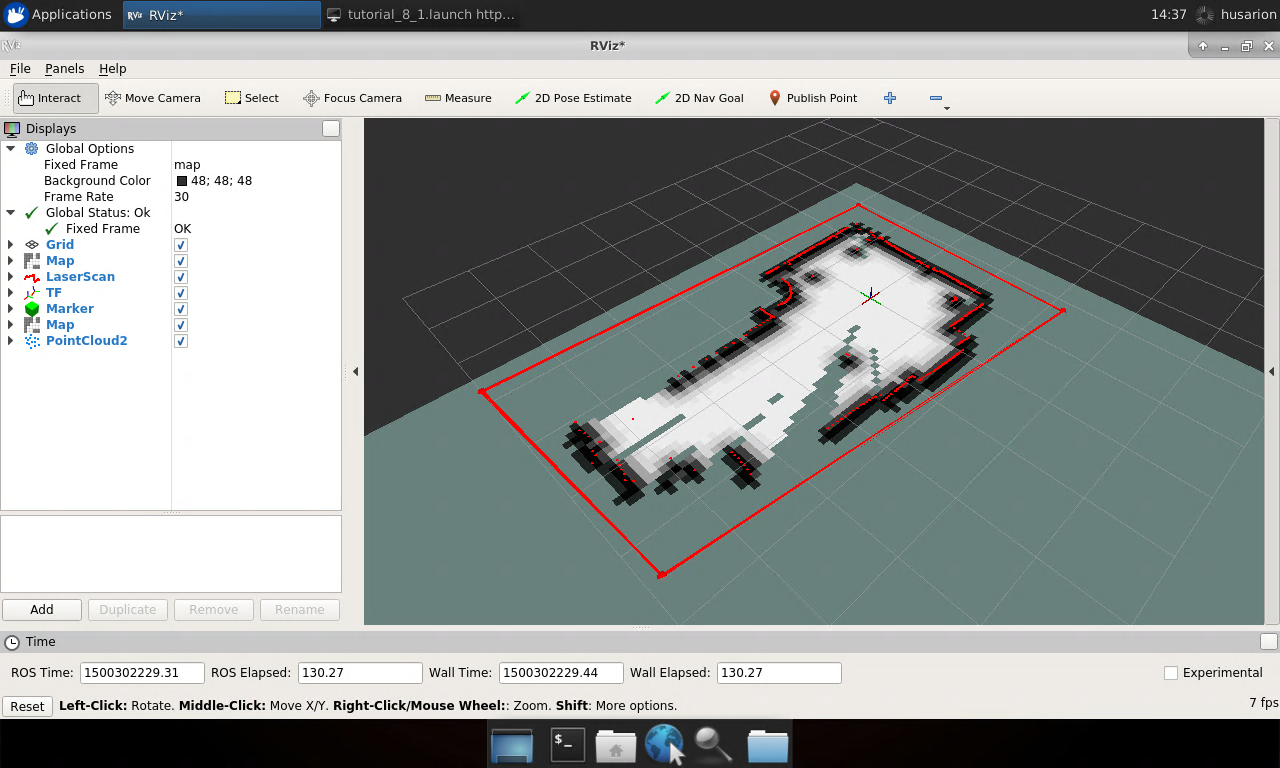
You need to use Publish Point button for the last time, click anywhere
inside region and exploration task will start.
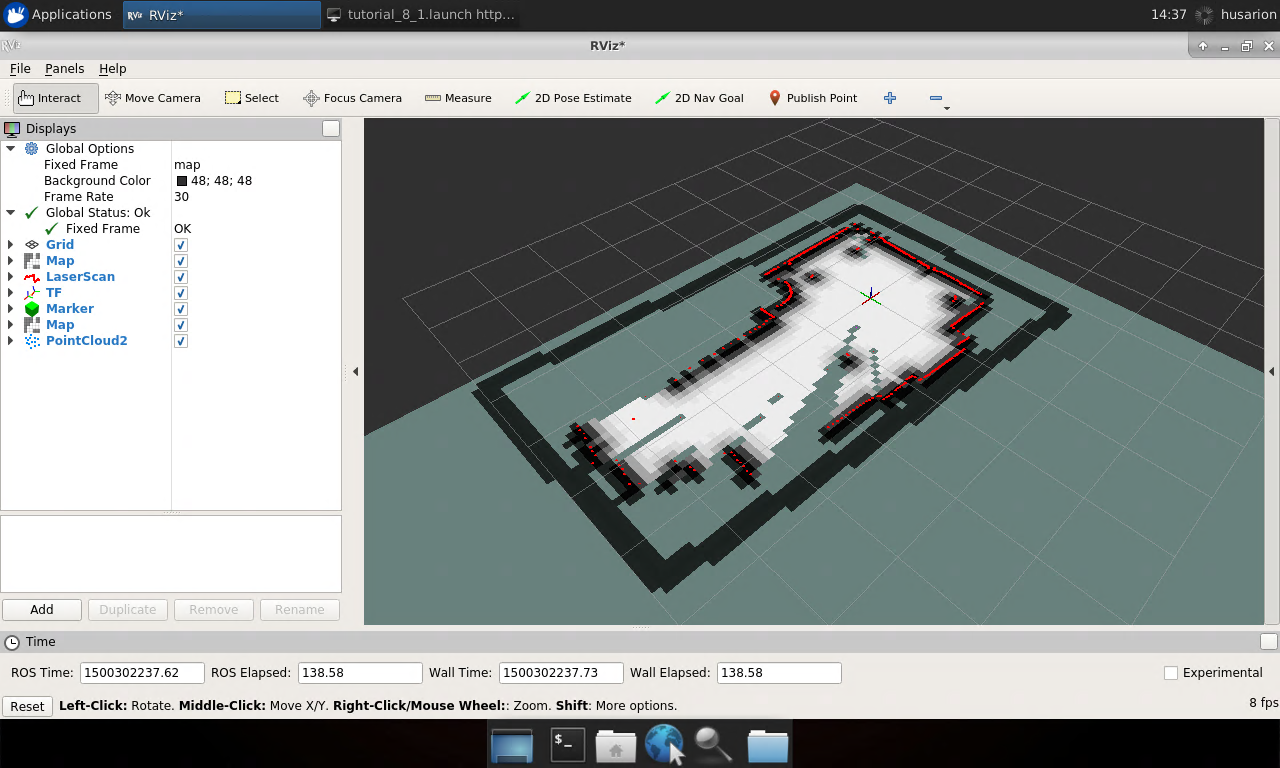
Robot will explore all accessible location within selected area. Observe as robot explores area, when there are no more frontiers or frontiers are not accessible due to obstacles, robot will stop and exploration task is considered as done.
Summary
After completing this project you should be able to configure
explore_server node to find frontiers on occupancy grid map and set
goals for trajectory planner to explore all unknown area, visualize
frontiers found on the map and finally set exploration area using rviz.
by Łukasz Mitka, Husarion
Need help with this article or experiencing issues with software or hardware? 🤔
- Feel free to share your thoughts and questions on our Community Forum. 💬
- To contact service support, please use our dedicated Issue Form. 📝
- Alternatively, you can also contact our support team directly at: support@husarion.com. 📧